지난 글(클릭 시 1편으로 연결)에서 우리는 확률모형 사이의 거리를 어떻게 정의할지 생각해 보았다. 특히 쿨백-라이블러 거리Kullback-Leibler divergence는 일반화된 피타고라스 정리를 만족하고, 투사projection라는 성질도 가지고 있음을 확인하였다. 이번 글에서는 쿨백-라이블러 거리의 또 다른 면모를 소개해 보려고 한다.
충분통계량sufficient statistic이라고 들어 보셨는지? 정해진 확률 \(\theta_0\)과 \(\theta_1\)을 따라 0과 1이 나오는 베르누이 시행을 생각해보자. (1, 1, 0, 1, …, 0)와 같은 10번의 시행 데이터가 있다. 이 결과를 보고 모형의 매개변수인 \(\theta_0\)과 \(\theta_1\)을 추론해보자. 이 추론 문제에서는 사실 10개의 이진 숫자들 \(x = (x_1, x_2, \cdots, x_{10})\)을 모두 기억할 필요는 없고, 10번의 시행에서 몇 번 1이 나왔는지 \(T(x)=x_1 + x_2 + \cdots + x_{10}\)를 아는 것으로 충분하다. 이처럼 \(x_i\)의 모분포를 추정하는데 필요한 모든 정보가 들어 있는 통계량 \(T(x)\)를 충분통계량[1]이라고 부른다. 포아송분포의 경우는 시행 데이터 \(x = (x_1, x_2, \cdots, x_{N})\)의 평균 \(T(x) = (x_1 + x_2 + \cdots + x_{N})/N\)이 포아송분포의 매개변수를 추론하는데 필요한 충분통계량이 된다. 그리고 정규분포의 경우는 데이터의 평균과 분산이 충분통계량이 된다.
정리를 해보면, 데이터 \(x\)에서 모형의 매개변수 \(\theta\)를 추정하는데 필요한 모든 정보는 충분통계량 \(T(x)\)에 들어 있고, \(x\)의 나머지 정보는 \(\theta\)와 무관한 것이다. 이 진술을 확률의 언어로 표현해보면 다음과 같이 쓸 수 있다.
\begin{align}
P(x|\theta) &= P\big(x,T(x)|\theta \big) \nonumber \\
&=P(T(x)|\theta)P(x|T(x),\theta) \nonumber \\
&=P(T(x)|\theta)P(x|T(x)).
\label{eq:sufficient}\tag{1}
\end{align}
첫째 줄에서는 \(T(x)\)는 주어진 \(x\)에서 온전히 얻을 수 있는 정보임을 이용해서 등식을 만들었고, 둘째 줄에서는 확률곱의 성질을 이용했고, 셋째 줄에서는 충분통계량 \(T(x)\)가 주어진 상황에서는 \(x\)의 나머지 정보는 \(\theta\)와 무관함을 이용했다. 그래프로 표현해보면, \(x \leftrightarrow T(x) \leftrightarrow \theta\)의 관계가 있는 세 변수 사이에서 \(T(x)\)가 고정이 되면 \(x\)와 \(\theta\)는 서로 독립이 된다.
충분통계량은 왜 언급했을까? 이는 확률모형의 변수변환을 생각해보기 위함이다. \(P(x; \theta)\)와 \(P(x; \theta’)\)의 거리는 변수 \(x\)를 변수 \(y=T(x)\)로 바꾸면 어떻게 될까? 일반적으로 데이터는 변환을 거치면 항상 정보를 잃게 된다. 따라서 해상도가 낮아진 변환된 변수를 통해서 모형들 사이의 거리를 보면 원래 거리보다 줄어들게 될 것이다. 이 정보잃음information monotonicity을 수식으로 표현하면 다음과 같다.
\begin{equation}
D[P(x;\theta)||P(x;\theta’)] \geq D[P(y;\theta)||P(y;\theta’)].
\label{eq:monotonicity}\tag{2}
\end{equation}
여기서 등식이 되는 경우는 변환 후에도 \(\theta\)를 추정하는데 아무런 정보도 잃지 않는 \(y=T(x)\)가 \(x\)에 대한 충분통계량이 될 때이다.
다음과 같은 형태의 거리 \(D_f\)를 정의해 보자.
\begin{equation}
D_f(\theta, \theta’) \equiv \sum_x P(x;\theta) f \bigg[ \frac{P(x;\theta’)}{P(x;\theta)} \bigg]
\label{eq:three}\tag{3}
\end{equation}
여기서 \(f(u)\)는 \(f(1)=0\)을 만족하는 임의의 오목함수이다. 이 경우 같은 모형 사이의 거리는 \(D_f(\theta, \theta)=0\)을 만족하게 된다. 이런 거리 \(D_f\)를 \(f\)-거리라고 부른다. 이제 \(f\)-거리가 충분통계량 \(y = T(x)\)에 대해서 어떻게 불변이 되는지 살펴보자. 위 식 (\ref{eq:sufficient})을 이용하면 다음 비례관계를 얻을 수 있다.
\begin{equation}
\frac{P(x;\theta’)}{P(x;\theta)} = \frac{P(y;\theta’)}{P(y;\theta)}.
\label{eq:four}\tag{4}
\end{equation}
이 관계를 이용하면 \(f\)-거리는 충분통계량에 해당하는 변수변환에 대해서 불변임을 확인할 수 있다.
\begin{align}
D_f(\theta, \theta’) &= \sum_x P(x;\theta) f \bigg[ \frac{P(x;\theta’)}{P(x;\theta)} \bigg] \nonumber \\
&= \sum_y \sum_{x \in y} P(x;\theta) f\bigg[ \frac{P(x;\theta’)}{P(x;\theta)} \bigg] \nonumber \\
&= \sum_y P(y;\theta) f \bigg[ \frac{P(y;\theta’)}{P(y;\theta)} \bigg].
\label{eq:five}\tag{5}
\end{align}
여기서 \(P(y;\theta) = \sum_{x \in y} P(x;\theta)\)를 이용하였다.
이제 두 분포 함수 \(p(x)\)와 \(q(x)\)사이에 정의된 몇 가지 \(f\)-거리를 살펴보자.[2]
| \(f(u)\) | \(D_f(p, q)\) | |
| Euclidean distance | \(| u – 1|\) | \(\sum_x | p(x) – q(x)|\) |
| Pearson \(\chi^2\)-divergence | \(\frac{1}{2} (u-1)^2\) | \(\frac{1}{2} \sum_x \frac{(p(x) – q(x))^2}{p(x)}\) |
| Neyman \(\chi^2\)-divergence | \(\frac{1}{2} \frac{(u-1)^2}{u} \) | \(\frac{1}{2} \sum_x \frac{(p(x) – q(x))^2}{q(x)}\) |
| Kullback-Leibler divergence | \(u-1- \ln u\) | \(\sum_x p(x) \ln \frac{p(x)}{q(x)}\) |
| Kullback-Leibler divergence | \(u \ln u – (u-1)\) | \(\sum_x q(x) \ln \frac{q(x)}{p(x)}\) |
이제 \(f\)-거리가 충분통계량에 대해 실제로 불변인지 우리가 관심을 가지고 있는 쿨백-라이블러 거리를 통해서 살펴보자. 확률 \(\theta_0\)와 \(\theta_1\)을 따라 0과 1이 나오는 베르누이 시행을 다시 생각해보자. \(N\)번의 시행 데이터를 보고 매개변수 \(\theta_0\)와 \(\theta_1\)를 추론해보자. 이 문제에서 두 모형 \((\theta_0, \theta_1)\)와 \((\theta’_0, \theta’_1)\) 사이의 \(f\)-거리는 \(x=(x_1, x_2, \cdots, x_N)\)를 알 때나, 이것의 충분통계량인 \(y=x_1 + x_2 + \cdots+ x_N\)를 알 때나 같아야 한다. 즉, \(D_{KL}[P(x; \theta) || P(x; \theta’)] = D_{KL}[P(y; \theta) || P(y; \theta’)]\)임을 확인해 보자.
\begin{align}
& D_{KL}[P(x; \theta) || P(x; \theta’)] \nonumber \\
&=\sum_{x_1, \cdots, x_N} P(x_1, \cdots, x_N; \theta) \ln \frac{P(x_1, \cdots, x_N; \theta)}{P(x_1, \cdots, x_N; \theta’)} \nonumber \\
&= N \sum_{x_1 \in \{0,1\}} P(x_1; \theta) \ln \frac{P(x_1; \theta)}{P(x_1; \theta’)} \nonumber \\
& = N \bigg( \theta_0 \ln \frac{\theta_0}{\theta’_0} + \theta_1 \ln \frac{\theta_1}{\theta’_1} \bigg).
\label{eq:kld_x}\tag{6}
\end{align}
위 계산에서는 \(x_1\), \(x_2\), \(\cdots\), \(x_N\)이 서로 독립이라는 사실에서 다음 등식을 이용하였다.
\begin{equation}
P(x_1, x_2, \cdots, x_N; \mu) = P(x_1; \mu)P(x_2; \mu) \cdots P(x_N; \mu).
\label{eq:seven}\tag{7}
\end{equation}
이번에는 충분통계량 \(y\)를 이용한 거리를 계산해보자.
\begin{align}
& D_{KL}[P(y; \theta) || P(y; \theta’)] \nonumber \\
&= \sum_{y} P(y; \theta) \ln \frac{P(y; \theta)}{P(y; \theta’)} \nonumber \\
&=\sum_{y=0}^N {N \choose y} \theta_0^{(N-y)} \theta_1^y \ln \frac{{N \choose y} \theta_0^{(N-y)} \theta_1^y}{{N \choose y} \theta_0^{‘(N-y)} \theta_1^{‘y}} \nonumber \\
& = N \bigg( \theta_0 \ln \frac{\theta_0}{\theta’_0} + \theta_1 \ln \frac{\theta_1}{\theta’_1} \bigg).
\label{eq:eight}\tag{8}
\end{align}
이 결과는 위의 식 (\ref{eq:kld_x})과 일치하는 것이다. 즉, 쿨백-라이블러 거리는 충분통계량에 해당하는 변수변환에 대해서 불변임을 확인한 것이다. 마지막 계산과정에서는 이항분포의 다음 항등식을 이용하였디.
\begin{align}
\sum_{y=0}^N y{N\choose y}\theta_0^{(N-y)} \theta_1^y &= \theta_1 \frac{\partial (\theta_0 + \theta_1)^N}{\partial \theta_1} = N \theta_1 \\
\label{eq:nine}\tag{9}
\end{align}
\begin{align}
\sum_{y=0}^N (N-y){N \choose y}\theta_0^{(N-y)} \theta_1^y &= \theta_0 \frac{\partial (\theta_0 + \theta_1)^N}{\partial \theta_0} = N \theta_0.
\label{eq:ten}\tag{10}
\end{align}
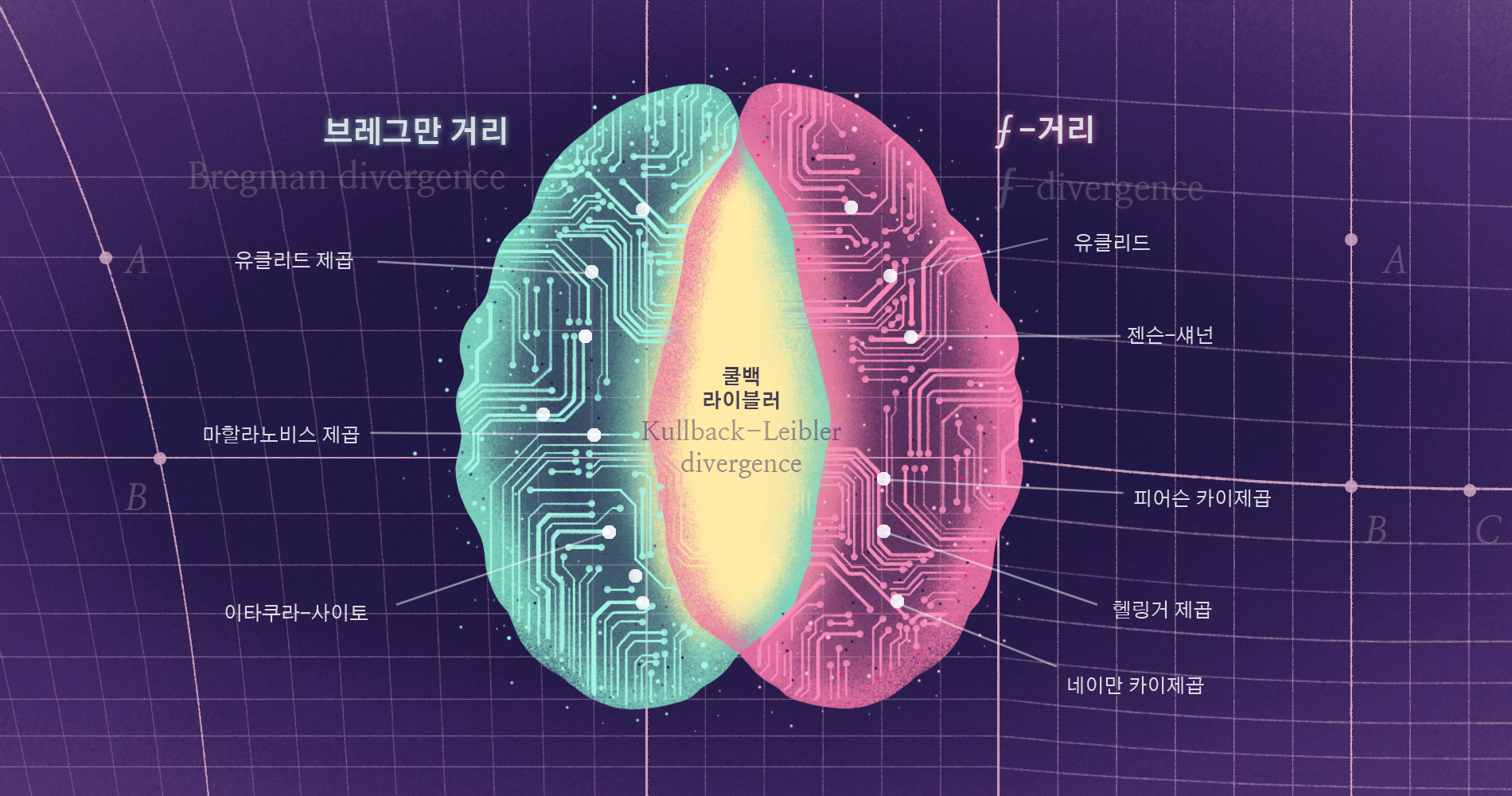
지난 글에서는 쿨백-라이블러 거리가 오목함수에서 정의되는 브레그만 거리 가운데 하나임을 확인했다. 이번 글에서는 쿨백-라이블러 거리가 \(f\)-거리 가운데 하나임을 확인했다. 흥미롭게도, 쿨백-라이블러 거리는 \(f\)-거리가 되는 유일한 브레그만 거리로 알려져 있다.[그림1] 두 글을 정리해 보자면, 쿨백-라이블러 거리는 쌍대적으로 평평한 공간에서 일반화된 피타고라스의 정리를 만족하고, 또 충분통계량에 대해서도 불변인 아주 특별한 거리이다.

머신러닝을 공부해 본 사람은 여기저기서 쿨백-라이블러 거리를 만난 적이 있을 것이다. 두 확률모형을 비교할 때, 또는 모형과 데이터의 분포를 비교할 때, 왜 하필 쿨백-라이블러 거리를 써야 하는지에 대한 하나의 설득력 있는 대답이 되었기를 바란다. 앞으로는 믿고 안심하고 쓸 수 있기를. 다음 연재에서는 이런 정보기하학적 개념이 실제 머신러닝의 최적화에 어떻게 멋지게 이용될 수 있는지를 한번 소개해 보겠다.