‘여러분, 우리가 중력파를 검출했습니다. 우리가 해냈습니다.’
파동에는 매질에서 역학적 진동을 전달하는 역학적 파동과 매질이 없는 진공에서도 전자기의 상호 유도현상에 의해 전기장과 자기장이 서로 수직으로 진동하면서 빛의 속력으로 전파하는 전자기파가 있습니다. 1865년 막스웰 방정식으로부터 유도된 전자기파의 파동방정식에서의 빛의 속력은 매질에 따라 달라집니다.
1916년 아인슈타인에 의해, 물질이 존재하고 있는 시공간의 휨으로 중력을 설명하는 아인슈타인의 장방정식(場方程式, field equations)으로부터 유도된 중력파의 파동방정식에서 중력파는 ‘진공에서의 빛의 속력(299 792 458 m/s)’으로 전파됩니다. 질량을 가진 물질의 가속운동에 의해 발생하는 중력파는 시공간 중력장의 곡면을 휨을 전파합니다.[1, 2]
아직 논문이나 어느 곳에서 그 증거는 발견되지 않았지만 기차를 좋아했던 아인슈타인이 계산했을 것으로 추측되는 중력파 변형 감도는 다음과 같습니다. 회전 주기가 1일이고 태양 질량과 같은 두 쌍성 별이 지구에서 만 광년 떨어져 있을 경우, 지구에서 관측되는 중력파에 의한 시공간 휨에 의한 변형 h는 h ~ 10-23정도이며, 시속 100 km/h으로 달리던 질량 100톤의 두 기차가 충돌하여 1/3 초 후에 정지하였다고 가정하면 이때 발생하는 중력파에 의한 변형 h는 h ~ 10-42 로 계산됩니다.[1] 이 값들은 너무나 작은 값이므로 아인슈타인은 측정이 불가능할 것으로 생각했습니다.
누구도 이를 검출할 수 있다고 확언하지 못했던 미약한 중력파의 존재를, 아인슈타인이 예측한 100주년이 되는 해인 2016년 10월 12일에, 라이고 4대 단장인 데이비드 라이츠(D. Reitze) 칼텍 교수는 레이저 간섭계를 이용한 중력파 검출 시스템인 두 고급 라이고에서 직접 검출하였다고 발표하였습니다.[3]
그런데 도대체 그토록 미약한, 중력파에 의한 시공간의 변형을 어떻게 관측하였을까요?
정밀하게 환경이 제어되는 실험실에서 주파수 안정화된 레이저를 사용한 간섭계로 길이를 측정하면, 대기의 공기 굴절률의 영향으로 길이 측정의 불확도가 10-8을 넘을 수가 없다는 사실과 이 10-21의 변형의 측정과 비교해 본다는 것은 너무나 큰 차이라 상상이 안 될 것입니다.
물론, 레이저 광계측학에 있어서 중요한 레이저의 광 주파수를 측정하는데 사용되는 레이저 주파수 콤(Laser Fequency comb)의 펨토초 레이저와 레이저 광의 위상 제어기술의 활용으로 광주파수의 절대값 측정의 상대적 측정불확도가 10-21 을 능가하고 있으며[4], 광격자시계 개발로 그 광주파수 절대값의 측정불확도 또한 10-18 에 달하고 있어서[5] 숫자로만 본다면 광주파수 표준이나 광 및 시간 계측표준 분야에 종사하는 이들에게는 크게 놀랄 일은 아닐 수 있겠지만, 그 규모 면이나 복잡성에 대해서는 감탄하지 않을 수가 없습니다.
본 아티클에서는 중력파 검출에 사용되었던 고급 라이고의 레이저 간섭계 시스템에 대해 이야기 하려고 합니다.
중력파와 레이저 간섭계 중력파 관측소, 라이고
미국에 설치된 2세대의 지상기반 중력파(GW) 검출 레이저 간섭계인 고급 라이고(advanced, Laser Interferometer Gravitational-wave Observatory, 고급 레이저 간섭계 중력파 관측소))[6]와 이탈리아에 설치된 고급의 비르고(advanced Virgo)[7]의 측정감도가 2015년에 크게 개선되어 초기 세대를 대체하였고, 2015년 9월 14일, 고급 라이고가 쌍성 블랙홀이 병합될 때 방출되는 중력파를 직접 검출검출한 날자를 고려하여 “GW150914(중력파150914)“ 라고 명명[8]하여 세 분의 과학자가 2017년 노벨물리학상을 수상한 이후 중력파 천문학의 새로운 시대가 열렸습니다[9]
지상에서 검출한 중력파 진폭(변형), h는 ΔL/L (strain, 변형: 변화된 길이/길이)로 나타나고, 중력파를 발생시킨 중력파원의 전체 질량을 M, 중력파원까지의 거리를 r, 중력파원의 속도를 v라 하면, h는 다음과 같이 주어집니다.[9,10]
여기서, G는 뉴턴상수 또는 만유인력상수라고 하는 중력상수이며 그 값은 (6.673 84 ± 0.000 0080) ×10-11 m3kg-1s-2 이며, c는 진공에서의 빛의 속력 299 792 458 m/s 를 나타냅니다. 변형 h ~ 10-21 크기의 GW150914 중력파를 검출한다는 것은, 4 km(4 x 103 m)의 팔 길이를 갖는 라이고 간섭계에서는 팔의 길이 변화를 4 x 10-18 m의 정도로 측정한다는 것을 의미합니다. 이것은 수소 원자의 양성자 반지름의 약 1/200에 상당합니다.
중력파는 질량을 가진 물질의 가속운동에 의해 중력장의 시공간 곡면에서 발생한 곡면의 요동이 빛의 속력으로 진행하는 파동을 말합니다.
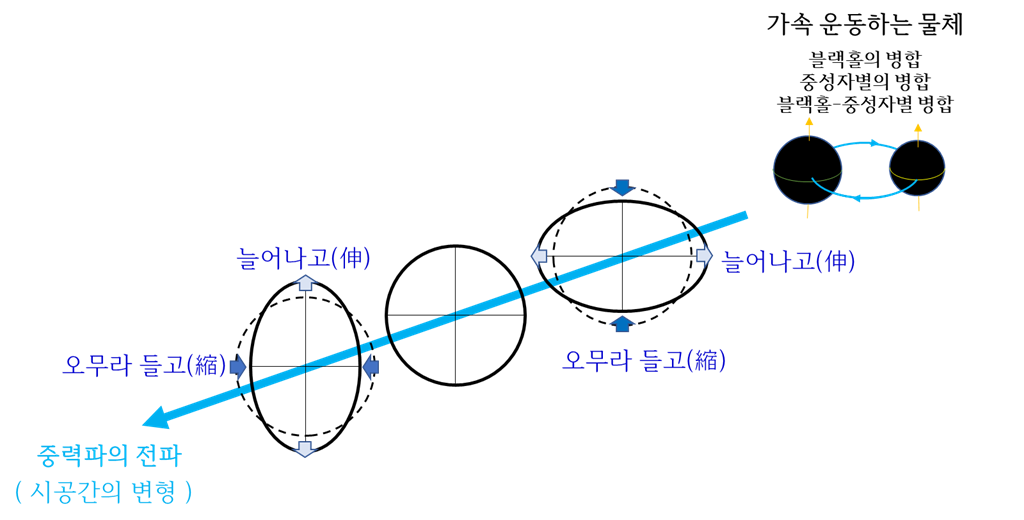
중력파는 시공간을 신축(stretching & squeezing)하면서 진행하는데 신축의 방향에 따라 2종류의 편광 모드가 존재하며 각각 플러스(+) 편광모드와 크로스 편광(x)모드 라고 부릅니다. 중력파는 이 두 편광 모드의 합성으로 표현할 수 있으며 그림 1는 + 플러스 편광을 갖는 중력파의 전파를 나타내었으며 원과 타원은 중력파의 동위상 파면을 나타냅니다.[9,10]
중력파는 1916년 아인슈타인의 일반상대성 이론의 장방정식에서 유도된 중력파 파동방정식으로 그 존재가 예측되었으나 아인슈타인도 그것이 측정될 것이라고는 생각하지 못한 이래, 40 여년간 중력파 측정에 대한 아무런 연구가 없었습니다.
1974년 테일러, 헐스에 의해 중력파를 방출하는 쌍성 펄서가 발견되고, 1978년 테일러에 의해 쌍성 펄서의 궤도 매개변수가 사중극자 공식에 따라 붕괴하는 것이 처음 발표되었고 32년간의 관측의 결과로, 2010년 와이젠버그, 나이스, 테일러 등에 의해 중력파의 복사 방출이 간접적으로 확인되었습니다.
한편, 1960년대 중력파 직접 관측에 대한 세계적인 열의에 불을 지핀 이는 J. 웨버이며, 그가 사용한 것은 압전소자들을 부착한 금속 막대 검출기였습니다. 이후 세계 각국의 유사한 검출기에서도 성과가 없자, 새로이 등장한 것이 레이저 간섭식 중력파 검출법이였습니다.[11, 12]
1972년 MIT의 라이너 바이스 교수는 MIT-RLE 보고서에서 다중반사 마이켈슨 간섭계를 이용한 중력파 검출기를 제안합니다[13]. 1970년대 후반에 칼텍의 이론물리학자인 킵손 교수도 스코틀랜드 글래스고 대학의 실험 물리학자 R. 드레버 교수(1979년)를 영입하고 드레버와 S. 위트콤(1980)이 이끄는 칼텍의 실험적인 중력파 그룹의 결성하였습니다.
1980년, 미국 국립과학재단(NSFNational Science Foundation)은 칼텍의 드레버와 위트컴이 이끄는 그룹이 40 m-프로토타입 간섭계를 건설하고, MIT의 바이스가 1.5 m-프로토타입 간섭계를 제작하는 데 자금을 지원했으며, 레이저 간섭계 중력파 검출을 공식적으로 제안했던 바이스가 수 km 길이의 간섭계 건설에 필요한 기술 및 비용 연구를 설계하고 이끌도록 자금을 지원하였고, 그 결과에 따라, ”라이고 과제“가 제안되고, 이어 NSF의 과제 승인함에 따라 1984년 라이고 건설 Caltech/MIT 프로젝트가 설립되었고, 정식 라이고 건설은 1994년부터 시작되었습니다.
1997년에는 그 필요성이 느껴져, 라이고 국제적 연구협력 기구인 라이고 과학적 국제협력체(LIGO Scientific Collaboration, LSC)가 라이고 2대 단장, 배리 배리시 칼텍 교수에 의해 조직 설립되어 독일 하노버에서 GEO600 간섭계를 운영하는 영국/독일 GWO협력, 영국의 글래스고 대학, 독일의 막스 플랑크 중력 물리학 연구소(알버트 아인슈타인 연구소) 및 독일 하노버에서 GEO600 간섭계를 운영하는 기타 기관들간의 협력 특히 이 협력단에 의해 많은 아이디어(재할용공진기, 4중진자서스펜션, DC-판독, 광자교정기, 스퀴즈 진공 인젝션 등)와 최초 실현으로 라이고 연구단에 많은 동력을 불어 넣었습니다.을 포함하여 Caltech 및 MIT를 넘어 라이고는 확장되였고 2007년 이태리/프랑스가 운영하는 비르고(Virgo)와 공동 협력도 비준이 되어 데이터 공동 분석를 하게 되었고, 2016년 중력파 검출을 발표할 시점에는 LSC는 세계 17개국의 133개 연구기관의 1,000 여 명의 과학자가 참가하는 거대한 연구협력체가 되었고 이 연구협력체가 중력파 검출 프로젝트를 성공으로 이끌었습니다.그간 미국립과학재단 NSF에서 지원한 총 연구비는 11억 달러: 1.46조원(1,330 원/달러)
2002년부터 초기 라이고가 5년간 가동되었고 2009년 부터는 개선된 라이고가 2년간 가동되었으며 2008년부터 고급 라이고 개발을 위한 지원으로 고급 라이고가 건설되기 시작하여 건설이 완료된 가동 첫해, 첫 과학 가동에서 중력파가 검출되었습니다. 1972년, 바이스 교수의 첫 제안으로부터 43년 후인, 또 아인슈타인이 중력파를 발표한 100주년 해인, 2015년 드디어 중력파가 검출된 것입니다.[14, 15, 16]
2018년부터는 영국-독일이 공동으로 구축 운영하는 GEO600 시스템에서 먼저 압착된 빛을 이용하여 변형 측정 감도를 높이는 것이 가능하게 되자, 고급 라이고를 포함한 다른 시스템에서도 현재에는 같은 방법의 검출기를 운용하고 있습니다. 이 라이고 시스템을 a+ LIGO라 부르며, 이후 라이고는 계속 진화하고 있습니다.
2021년부터는 간섭계 거울의 열잡음을 줄이고 진동 잡음을 줄이기 위해 지하 3 km 위치에 설치한 극저온 거울의 간섭계를 운영하는 일본의 중력파 관측소 KAGRA(KAmioka(중성미자 검출기를 설치한 광산 이름, 神岡) + GRAvitaional wave) 일본 신사에서 신에게 바쳐지는 의식 춤인 가구라(神楽)의 동음어,https://en.wikipedia.org/wiki/KAGRA 연구단이 LSC에 가입이 되어 공동연구를 수행하고 있습니다.
IndIGO는 인도에 위치할 중력파 검출기인 LIGO-India 프로젝트를 계획하는 인도 파트너(미국의 LIGO 연구소와 함께)이며, 2023년 2월 현재 인도 정부는 LIGO-India에서 건설을 시작하는 데 필요한 약 3억 2천만 달러의 최종승인을 승인했습니다. LIGO-India는 최초의 시공간 잔물결을 직접 검출하여 중력파 직접 검출의 역사를 만든 두 LIGO(Laser Interferometer Gravitational-Wave Observatory) 시설과 거의 동일한 버전(미국의 라이고 간섭계 1세트가 인도에 위탁되었음.)으로 2030년 말까지는 첫 관측이 예상됩니다.
이제 본론으로 들어가서,
중력파를 측정하기 위하여 그림 2와 같이 두 암 공진기가 마이켈슨 간섭계의 양팔에 놓여져 있는 구조의 파브리-페로 마이켈슨 간섭계가 사용되고 있는데 암 공진기의 거울(테스터 질량)과 광속분할기는 사중진자 서스펜션에 매달려 바닥의 지진으로부터 격리되어 있으며, 암 공진기들의 길이와 두 암 공진기 길이 차이가 일정하게 유지(안정화) 되고 있습니다. 이때 사용되는 기술을 ‘PDH-안정화 기술’이라고 합니다.
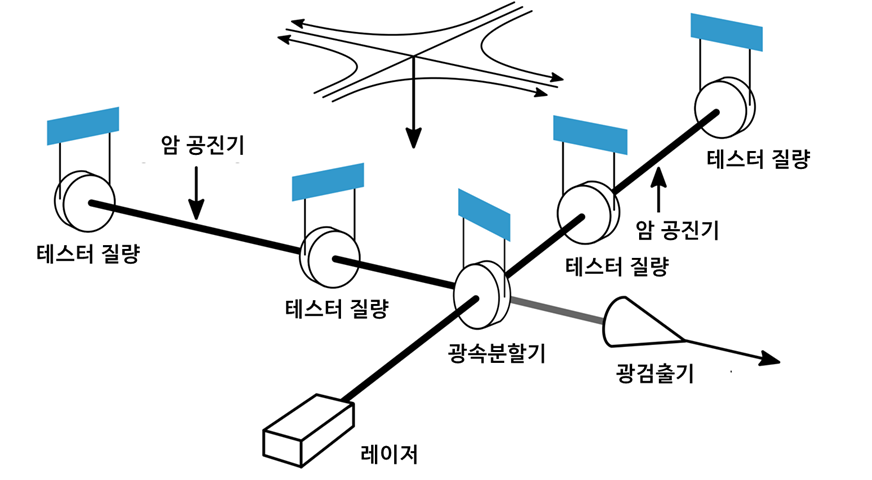
그림의 쌍곡선 쌍의 화살표 방향은 중력파의 파면 스트랫칭의 방향을 나타내며, 1/2주기 후에는 방향이 반대로 바뀌게 됩니다. 아랫 방향의 화살표는 중력파의 진행 방향을 나타내었습니다.
PDH-안정화 기술
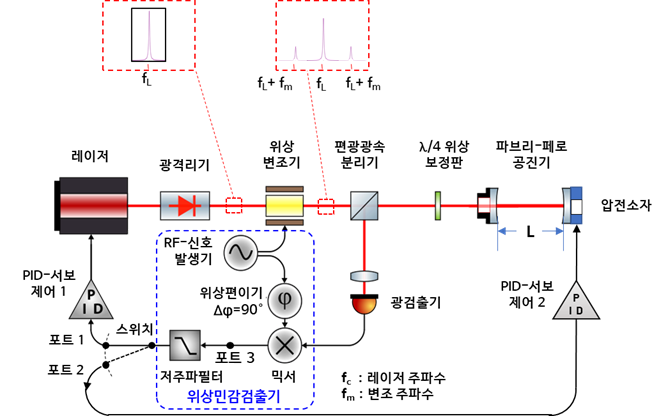
간섭계의 출력에서 나오는 두 암 공진기 길이 차이의 변화에 비례하는 광검출기 신호로부터 중력파 검출을 합니다. 그러므로, 변화하는 공진기 길이를 제어하는 것이 가장 중요한데, 이를 위해 개발된 기술이 PDH-기술이라 알려진 위상 변조(또는 주파수 변조) 분광학을 이용한 주파수 안정화법입니다(그림 3). 여기서, PDH-기술의 PDH는 이 기술 개발에 관련된 분들 이름의 앞 글자로 지어진 것입니다. P는 1947년 마이크로파의 공진기에 마이크로파 주파수를 안정화한 기술을 처음 개발한 하버드 대학의 R. V. Pound 교수[17]를, D는 중력파 검출에 사용할 공진기 또는 레이저의 주파수를 안정화한 스코틀랜드 글래스고 대학 및 칼텍의 R. Drever교수[18]를, H는 드레버와 거의 같은 시기에 같은 방법으로 요오드 안정화 레이저를 연구한 한 미국 JILA의 J. Hall 교수(2005년 노벨상 수상)를 각각 나타냅니다[19]
단일 횡모드(TEM00)의 단일 주파수(fL) 레이저의 빔이 광격리기를 지나서 위상 변조기에서 수 10 MHz 정도의 라디오 주파수(fm), RF의 작은 진폭의 정현파 신호로 레이저 주파수를 위상을 변조를 하면, 반송파인 레이저 주파수(fL)의 양쪽 측면에 2개의 측대파(fL-fm, fL+fm)가 생깁니다.
지면에 나란한 수직편광된 레이저 반송파와 두 측대파는 파브리-페로 공진기에서 반사하여 λ/4 판을 2번 통과하면서 수평편광으로 바뀌어 편광광속분할기 PBS에서 반사되어 광검출기에 입사하면 광검출기에서는 반사광의 세기에 비례하는 전압 신호가 검출됩니다.
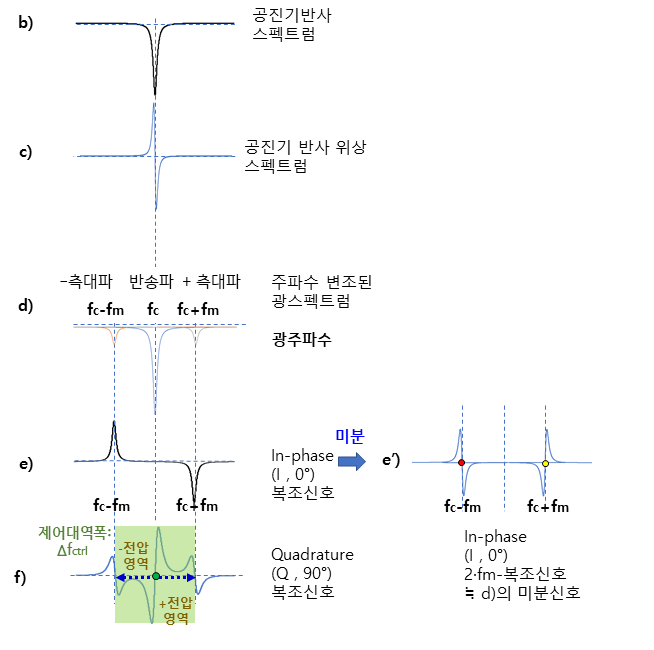
이때, 공진기의 반사광의 광스펙트럼은 그림 3의 b)와 같은 신호가 됩니다. 또 반사광의 위상신호 스펙트럼은 그림 3의 c)와 같고, 레이저 주파수를 주사하면서 반사 광스펙트럼을 측정하면 그림 3의 d)와 같은 신호를 얻게 됩니다. 이는 위상 변조된 레이저 광과 공진기의 반사 특성이 상호작용한 결과입니다.
그림 3의 a)에서와 같은 위상민감검출기를 이용하여 이 RF변조 신호와 90도 위상 차이가 나는 기준신호를 사용하여 얻은 복조신호는 그림 3의 f)와 같은 원점에 점-대칭적인 분산형 신호로서 제어 대역폭 2·fm(±fm)을 갖는 주파수 분별 신호입니다. 이 신호를 제어회로에 사용하면 반송파 레이저 주파수를 공진기의 공진주파수에 안정화할 수가 있습니다.
레이저 주파수가 외부교란에 의해 흔들리더라도, 제어대역 안에만 존재하면 안정화를 위한 제어 회로는 동작하여 안정화가 계속 유지될 수 있다는 것을 뜻합니다. 이것이 광대역폭의 강한 제어루프를 갖는 PDH-안정화 기술의 특징이라 볼 수가 있습니다.
변조 주파수 신호와 동 위상 신호(in-phase)를 이용하여 복조하면 e)와 같은 두 측대파의 주파수에서 흡수형의 신호를 얻을 수가 있습니다. 측대파 주파수를 안정화하려고 하면, 이 복조 신호를 미분한 그림 3 e’)와 같은 신호를 주파수 분별 곡선으로 이용하면 됩니다. 이때 동 위상 신호의 2차 고조파인 2·fm 주파수 신호를 사용하면 그림 3 e‘)와 같은 분산형 신호를 얻어 측대파 주파수 제어에 사용할 수 있습니다.
한편, 그림 3의 a)에서 스위치를 포트 1, 또는 포트 2에 연결에 따라 레이저 주파수를 공진기의 공진주파수에 안정화할 수도, 공진기의 공진주파수를 레이저의 주파수에 안정화할 수도 있습니다.
레이저 간섭계와 핵심 광학
마이켈슨 간섭계Michelson Interferormeter는 1887년 빛이 전파하는 매질인 ‘광학 에테르“가 존재하지 않는 것으로 판명난 유명한 마이켈슨-몰리 실험에 사용되었습니다. 또 미터원기 기준으로 카드뮴-114 원자의 적색 복사선의 파장의 정밀측정을 위한 그의 실험에서는 파브리-페로Fabry-Perot 간섭계가 사용되었습니다. 이후, 이들 간섭계는 길이나 각도, 굴절률, 열팽창 계수 등 다양한 물리 및 관련량의 정밀측정에 사용되어 왔습니다. 중력파 검출 라이고에서는 마이켈슨 간섭계의 양팔에 파브리-페로 공진기를 넣은 결합인 파브리-페로 마이켈슨 간섭계가 글래스고 대학 & 칼텍 대학의 R. 드레버 교수에 의해 고안되어 사용되었습니다.
그림 4은 2015년에 중력파 검출한 고급 라이고의 간섭계를 나타내었습니다. 간섭계를 이루는 ‘핵심 광학’ 들은 간섭계 성능의 핵심이며 다음과 같은 요소로 구성됩니다.(핵심 광학의 규격은 표 1. 참조).
• Fabry-Perot 암 공진기를 형성하는 2쌍의 입력 및 최종 테스트 질량(중력파를 테스트 하는 큰 질량의 거울을 테스트 질량이라 부른다. ITMInput Test Mass & ETMEnd Test Mass)
• Michelson 간섭계의 중앙 부분의 50/50-광속분할기(BS)
• ITM에 액츄에이터 역할을 하고 열보상을 적용할 수 있는 인접한 보상판(CPCompesation Plate)
• ETM에 액츄에이터 역할을 하는 반작용 질량(ERM)
• 두 ITM와 함께 출력 및 신호 재활용 공진기를 형성하는 반사 거울(PRMPower Recycling Mirror& SRMSignal Recycling Mirror)
• 신호 및 전력 재활용 반사 거울(PR3, PR4, SR2, SR3)들 입니다.
레이저 간섭계의 여러 공진기를 길이나 정렬을 정밀하게 제어하여야 하는데, 5개의 길이 자유도, DARMDifferential ARm-cavity Mode, CARMCommon ARm-cavity Mode, MICHMICHelson interferometer, PRCLPower Recycling Cavity Length, SRCLSignal Recycling Cavity Length와 10개 이상의 각도 자유도를 PDH-기술을 이용하여 제어합니다.
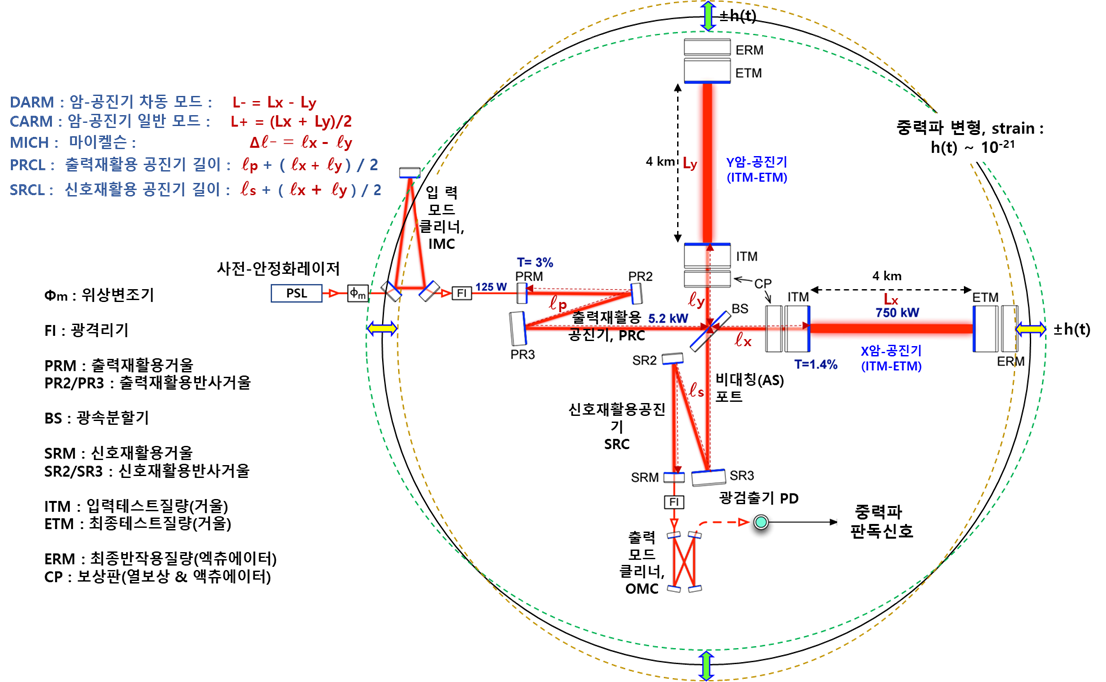
FI: 광격리기; Φm: 위상 변조기; PD: 광검출기. 레이저 출력 숫자는 최대 동작 출력에 해당합니다. 레이저 제외하고 표시된 모든 구성 요소는 서스펜션 시스템에 매달려 있으며 서스펜션 시스템은 능동적인 2단 또는 3단의 지진 격리 시스템에 고정되어 있습니다.
표 1. 핵심 광학의 파라미터
투과율은 1,064 nm 파장에 대한 값이며 괄호 안의 투과율은 532 nm 파장에 대한 값입니다.
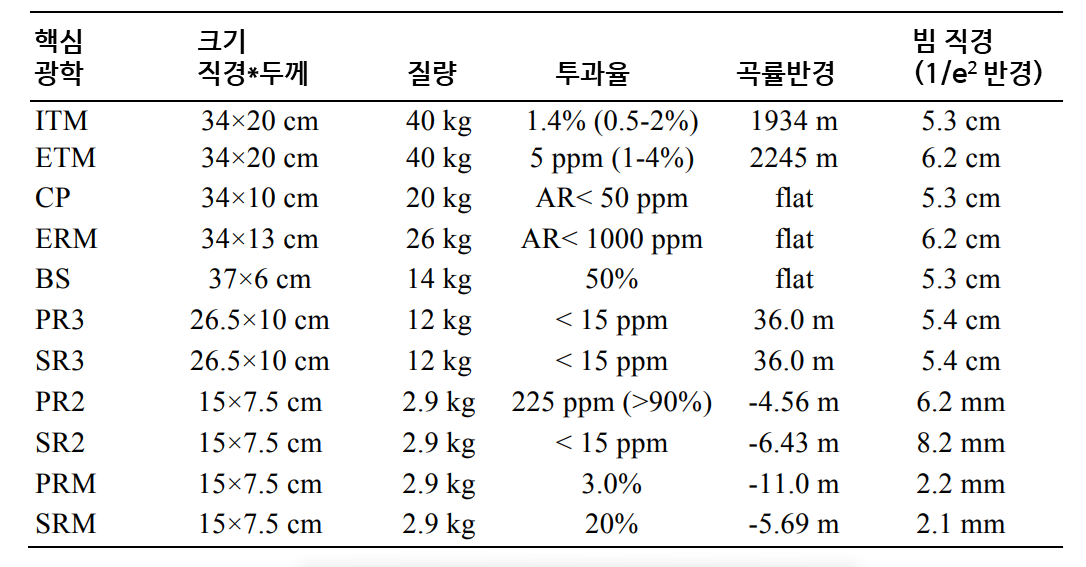
파브리-페로 암-공진기는 서로 나란하게 설치된 40 kg 질량의 대형 거울 쌍을 말하는데, X-암 공진기, Y-암 공진기라 부릅니다. 이 4개 거울들을 ’테스터 질량(test mass)’ 이라 하고, 각각, X-입력 테스터 질량(ITMX), X-최종 테스터 질량(ETMX), Y-입력 테스터 질량(ITMY), Y-최종 테스터 질량(ETMY) 이라 부릅니다. ITMXInput Test Mass X, ITMYInput Test Mass Y 앞단에는 위상판 CPCompensation Plate이 있고, 최종 테스터 질량 ETMXEnd Test Mass X, ETMYEnd Test Mass Y 뒷단에는 최종 반작용 질량 ERMXEnd Reaction Mass X, ERMYEnd Reaction Mass Y가 있으며 테스터 질량과 마주하는 반작용 질량의 한 면에는 정전기 액츄에이터 기판이 코팅되어 있습니다. 이를 이용하여 공진기 길이를 제어합니다.
출력 재활용 공진기 PRCPower Recycling Cavity
레이저 출력을 높이는 것은 광자의 개수 n을 늘려 산탄 잡음(shot noise)이 1/√n에 비례하여 줄이는 것이 되므로 이를 위하여 광속분할기 BS와 레이저 사이에 출력 재활용 거울 PRM을 두어 PRM와 광속분할기 BS의 오른쪽은 입력 테스터 질량과 Y-입력 테스터 질량 사이를 레이저 광이 누적 공진하게 만들어 두 암-공진기로 들어가는 광을 출력을 증폭시키는 역할을 합니다.
신호 재활용 공진기 SRCSignal Recycling Cavity
광속분할기 BS에서 두 입력 테스트 질량 ITMX와 ITMY 사이의 거리가 약간 다르게 비대칭적으로 배치되는데 이렇게 하여 마이켈슨 출력 포트 쪽에는 간섭무늬가 나오지 않는 다크 프린지(어두운 간섭무늬)가 관찰됩니다. 이와같은 출력 포트를 비대칭(AS) 포트라고 합니다. 마이켈슨의 비대칭(AS) 출력 포트에 있는 신호 재활용 거울(SRM)은 중력파 신호에 대한 암 공진기의 피네세(예리도, finesse)를 효과적으로 낮추고 넓은 검출기 주파수 응답을 유지하는 데 사용됩니다. 원칙적으로 신호 재활용은 협대역 작동 모드를 생성하는 데에도 사용할 수 있으며, 다른 주파수에서는 잡음이 더 높지만 특정한 중력파 검출 대역에서 감도를 향상시킬 수가 있습니다.
모드 클리닝 공진기 MCC Mode Cleaning Cavity
고출력의 레이저에는 가우시안 강도 분포를 갖는 기본의 TEM00모드와 함께, TEM01모드, TEM10모드, TEM02 모드등과 같은 고차의 횡모드 들이 많이 존재하지만 중력파 측정에는 기본 모드만을 사용하지 않기 때문에 불필요한 고차모드는 모두 차단하는 클리닝을 하여야 합니다. 이를 위해, 기본 모드에만 모드 매칭이 되는 링형 파브리-페로 공진형 모드 클리너를 이용합니다. 간섭계의 모든 공진기나 모드 클리너 및 레이저는 공진기 길이 제어를 하여야 하는데 모두 PDH-기술을 사용합니다.
NPRO-레이저
간섭계의 광원으로는 반도체 레이저로 펌핑되는 낮은 위상잡음을 갖는 단일 블록형의 비-평면 링 공진기(Mono-lithic Non-planar Ring Oscillator, NLRO) 구조비평면 공진기의 경사진 결정면의 편광의존 손실을 이용한 단일 진행파로 발진 레이저는 공간적 균일한 전자기장을 만들기 때문에 정상파의 일반 레이저 발진에서와 같은 홀-번닝 효과에 의한 위상잡음이 없다를 갖는 Nd:YAG 고체 레이저를 마스터 레이저로 하여, 2단의 출력 증폭 단계를 거쳐고 또 출력과 주파수를 사전에 고도로 안정화한 레이저가 사용됩니다.
NLRO-레이저는 레이저 결정의 크기가 작아 왕복 길이가 짧고 자유 스펙트럼 범위가 넓어서 수 GHz에 걸쳐 단일 종모드로 주파수 튜닝이 가능합니다. 레이저 결정을 압전소자로 누르거나 Peltier 열전소자로 레이저 결정의 온도를 조정하거나 펌프 반도체 레이저의 전류을 조정하여 주파수 튜닝을 할 수 있습니다. 또 정밀 튜닝을 위한 전기광학 결정을 포함하는 NLRO-레이저는 중력파 검출 레이저 간섭계에서 사용됩니다.
또 안정적인 기계적 디자인, 레이저 공진기의 낮은 광 손실 및 펌프 소스로서의 레이저 다이오드의 낮은 잡음으로 인해 NPRO의 레이저 잡음은 매우 작으며 발진하는 레이저의 선폭은 수 kHz 정도입니다.
그림 5에는 이 NLRO-레이저를 마스터 레이저로 사용한 사전 안정화 레이저(PSL) 시스템의 개략도 입니다.[20]
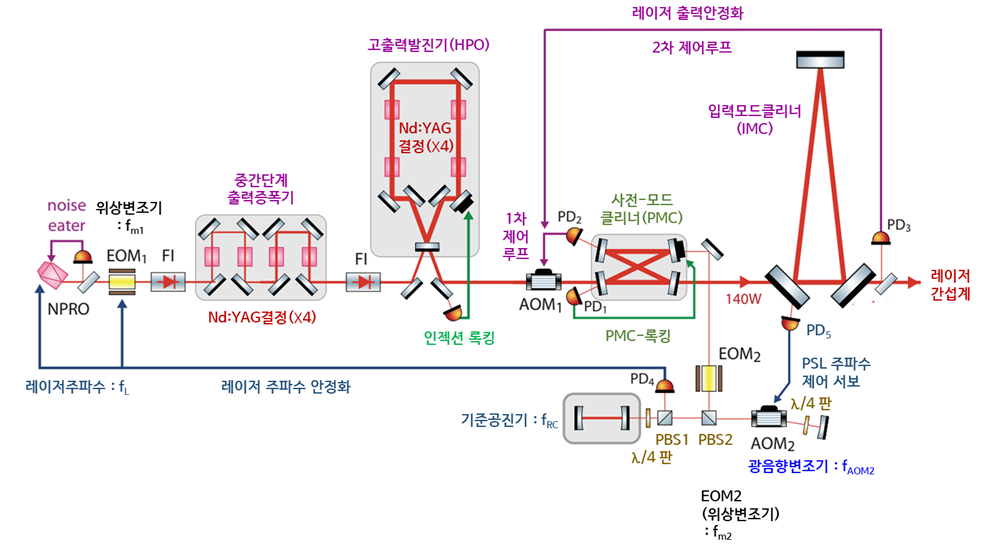

MOPA와 사전 모드 클리너 PMCPre Mode Cleaner
자체 잡음 제어 시스템이 동작하는 낮은 위상 잡음의 2 W 출력의 마스터 레이저 출력 빔은 2단의 레이저 증폭기(Nd:YAG 결정, ×4)를 거쳐 220 W로 증폭(MOPA, Master Laser Power Amplification, 마스터 레이저 출력 증폭)됩니다. 각 단에서 증폭 매질인 레이저 결정에는 광축 방향으로 펌핑용 반도체 레이저가 광섬유를 통해 입력(그림에는 표시 않음) 됩니다.
7개의 공진 거울들로 구성되는 2번째 증폭 단의 링형 공진기로 들어가는 레이저 빔으로 인해 인젝션 록킹이 일어나 고출력 증폭 공진기의 공진주파수와 레이저 주파수는 공진됩니다. 물론, 한 거울에 부착한 압전소자를 액츄에이터로 사용하여 레이저와 공진기 사이의 위상 매칭을 위한 제어 서보시스템은 가동됩니다.
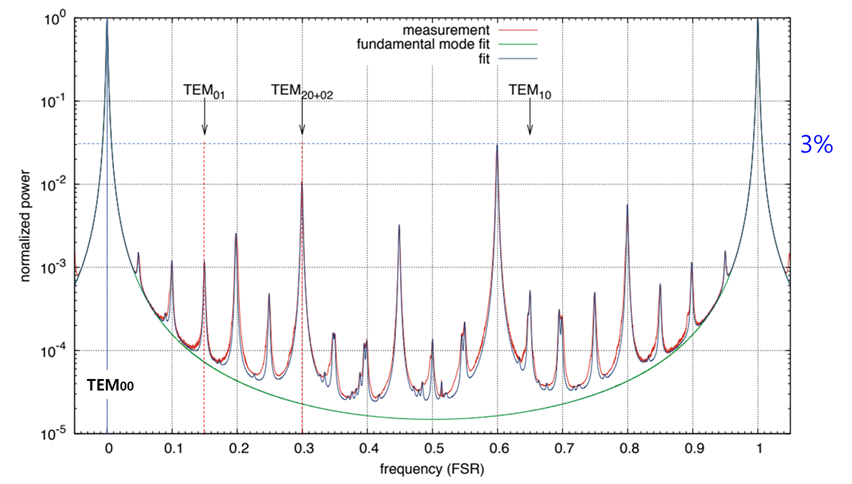
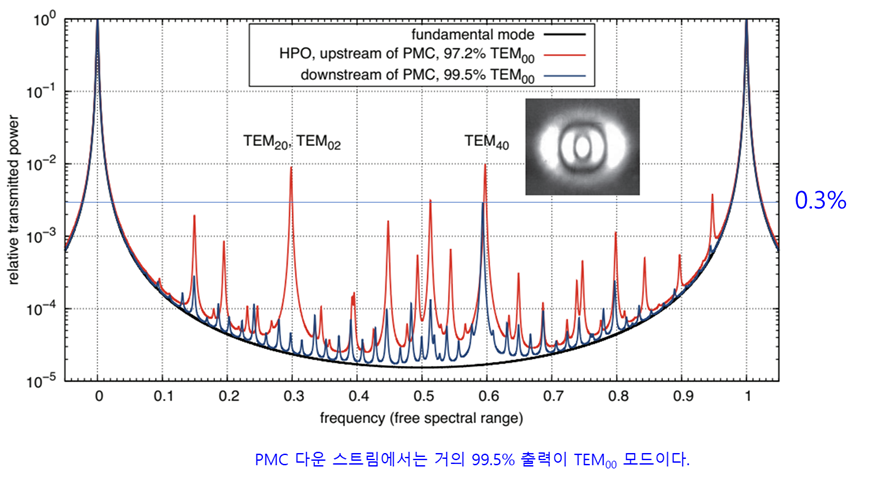
이렇게 증폭된 레이저의 빔에는 많은 횡모드들이 관측됩니다.(그림 6 a) 그림에서 기본 TEM00모드는 양끝의 큰 피크이고 가운데에는 많은 고차모드와 이들 사이의 하모닉 성분들이 보입니다. 이들 고차모드의 출력은 전체 출력의 5.3 % 입니다, 실험에 사용하지 않는 고차 횡모드를 차단하기 위하여, 첫 번째 사전-모드 클리너 공진기 PMC(왕복 길이가 2 m인 8-자형 공진기)는 빔의 지터(TEM01 및 TEM10 모드의 진폭 감소 계수 : 63)를 줄이고 RF 측대파에 대한 저역 통과 필터(560 kHz의 공진기 pole) 역할도 하여 PMC를 통과한 140 W의 레이저 스펙트럼은 전체 출력의 99.5 %가 실험에 사용할 기본 모드로 많이 클리닝이 되었음을 알 수가 있습니다.(그림 6b)
고출력 레이저의 출력 안정화
중력파의 희미한 신호를 직접 감지하기 위하여, 중력파 검출기는 가장 정밀한 암 공진기 차동 모드(DARM, L-)의 변화 측정을 수행합니다. 광검출기의 DC-출력에 비례하는 중력파 신호를 검출하는 2세대 고급 라이고에서의 이 변화 측정의 감도는 RF-판독법을 이용하는 1세대 초기 라이고보다 감도가 10배 더 우수하며 10-24Hz-1/2 에서 10-23Hz-1/2 사이의 변형 감도에 도달합니다.
그러므로, 레이저 출력 안정도는 중력파 DC-판독 신호의 잡음에 직접 영향을 주기 때문에, 출력 안정도 요구조건은 검출 대역에서 매우 엄격합니다.
또, 최대 레이저 출력에서 암 공진기의 레이저 복사압 효과에 의한 잡음 생성 때문에 출력 재활용 거울(PRM)에 대한 입력 레이저 출력(140 W)에서 10 Hz 에서 2×10-9 Hz-1/2의 출력 잡음 사양이 요구합니다. 이 안정도는 여러 센서와 피드백 루프를 통해 달성됩니다.
그림 5 a)에서 첫 번째 PD1을 포함하는 제어 루프는 사전-모드 클리너 PMC의 공진주파수를 PDH-기술로 레이저 주파수에 안정화하는 것이고 출력 잡음 센서 PD2는 PMC의 한쪽 거울에서 투과 출력을 측정하고 두 번째 출력 잡음 센서 PD3는 입력 모드 클리너를 투과한 빛을 샘플링 합니다.
PD2는 높은 대역폭을 갖는 사전-모드 클리너의 주파수 피크에 레이저 출력을 제어하기 위한 것이고, PD3를 포함하는 제어 루프는 입력 모드 클리너의 공진 피크 투과점에 레이저 출력을 안정화하는 낮은 대역의 출력 제어 루프를 위한 것이고, 음향 광학 변조기(AOM1)는 레이저 출력 제어 루프용 액추에이터로서, AOMAcoustic Optic Modulator에 인가할 변조 신호의 진폭 제어를 통해 출력 제어가 달성됩니다.
레이저 주파수 사전 안정화
레이저 주파수의 사전 안정화에는 2단의 제어회로가 동작합니다.
• 첫 번째는 고안정의 기준공진기(fRC)에 NPRO 마스터 레이저 자체 주파수(fL)를 안정화하는 것입니다(fL= fRC). 이때, NPRO 레이저의 주파수 제어 액츄에이터로서는 제어 대역에 따라 열전소자, 펌프 반도체 레이저의 전류 및 전기광학소자등이 사용됩니다.
• 두 번째로는 입력 모드 클리너 공진주파수(fIMC)에 레이저 주파수(fL)가 공진이 되도록, 하기 위해 AOM2을 2회 왕복 통과시켜 AOM2 드라이버 주파수(fAOM2)의 2배가 주파수 편이 되도록 하여 AOM2 드라이버 주파수(fAOM2)를 제어 합니다.(2fAOM2 = fL – fIMC)
이들은 각각 그림 5 a)의 왼쪽 아래 부분과 오른쪽 아래 부분에 그려져 있습니다.
사전 모드 클리너(PMC)의 공진주파수 안정화
앞에서 기술한 바와 같이, PDH-기술을 이용하여 그림 5에서 PMC에서 반사된 광을 광검출기 PD1으로 검출하여 레이저 주파수 (fL)에 PMC의 공진주파수 fPMC를, 압전소자가 달린 거울의 위치를 제어하여, 안정화시킵니다(fPMC = fL).
공진기들의 공진주파수와 레이저 주파수 사이 관계
이상에서 기술한 제어 루프에 대해 정리하면, 레이저 주파수 fL, 기준공진기의 공진주파수 fRC, PMC 공진주파수 fPMC, IMCInput Mode Cleaner 공진주파수 fIMC, 광음향변조기 AOM2의 변조주파수 fAOM2 들 사이에는 다음과 같은 관계가 성립합니다. fL = fPMC = fIMC = fRC – 2·fAOM2
입력 모드 클리너 IMC를 포함하는 입력광학 시스템
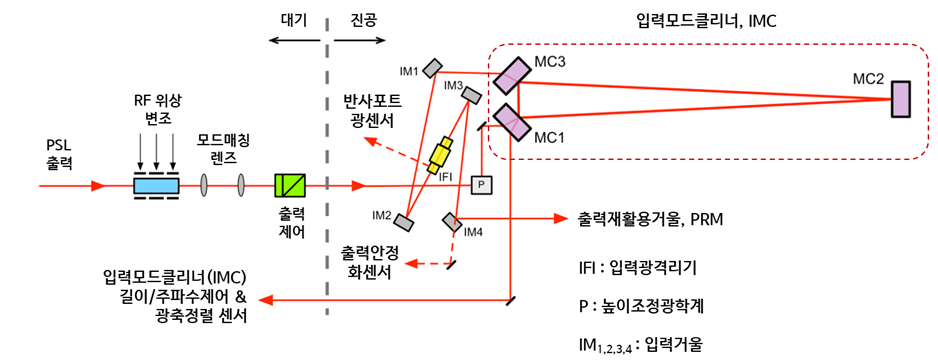
그림 7에는 입력 모드 클리너(IMC)를 포함하는 입력광학 시스템의 구조를 나타내었습니다. 사전-안정화 레이저 PSL의 빔을 모드매칭 렌즈 세트를 사용하여 입력 모드 클리너에 모드매칭되게 하여 입사시킵니다. 높이 조정용 광학계 P인 잠망경 광학계를 통해 높이 조정된 빔은 모드 클리너로 입사되고 투과된 광은 IM1,2,3,4 거울들을 반사하여 간섭계의 앞단에 있는 출력 재활용 거울 PRMPower Recycling Mirror으로 입사됩니다.
그 중간에 입력 광격리기 IFI를 지나는데, IFI 내부의 편광광속분할기 PRM에서 반사된 광은 반사포트 광센서로 입력되어 그 일부가 암-공진기 일반모드(L+) 및 암-공진기 차동모드(L-)의 길이를 제어하는 신호로 사용됩니다.
또 모드 클리너에서 MC1 거울에서 반사된 광은 중간의 반사거울에서 한번 더 반사되어 입력 모드 클리너IMC 길이 제어/주파수 제어 및 광축 정렬 등의 센서들로 입사되어 여러 제어 신호로 사용됩니다. 가운데 그려넣은 점선의 오른쪽은 초고진공 챔버 안을 나타내고 왼쪽은 대기 상태에 놓여져 있는 것을 나타냅니다.
모드 매칭 Mode Matching
모드 매칭은 레이저 빔 특성을 나타내는 파면 곡률과 파면의 위상 및 빔 사이즈들을 공진기의 고유한 그 값들과 공진기의 광학 거울면에서 일치시키는 것으로서, 레이저와 공진기 사이에 몇 개의 모드 매칭 렌즈와 반사 거울을 이용하여 수행합니다. 모드 클리너, 재활용 공진기, 암 공진기, 출력 모드 클리너들의 입력 거울면과 출력 거울면에서 레이저 빔의 특성과 모두 모드 매칭이 되고 제어되어야 합니다.
진동 및 지진 격리
가능한 한 가만히 있어야 하는 검출기인 레이저 간섭계, 라이고가 너무 민감하여 근거리와 원거리에서 온 가장 작은 진동을 느낄 수 있다는 것은 아이러니합니다. 지구상의 거의 모든 지진과 진동의 분위기 속에서 중력파는 라이고의 거울에 미세한 진동을 주어 자신을 알리기 때문에 중력파 검출을 가능하게 하는 유일한 방법은 라이고 간섭계의 구성 요소 모두를 환경 진동으로부터 전례 없는 수준으로 격리시키는 것입니다.
중력파가 통과할 때 라이고의 4 km 거리의 암 공진기 거울 사이의 거리 변화는 10-19 m 정도이므로, 능동식 지진 격리 플랫폼에서 2*10-13 m/√Hz (@10 Hz) 잡음 정도로 격리하고 수동식 사중진자 서스펜션 시스템에서 백만배 정도를 더 격리하여 10-19 m/√Hz (수평) 및 10-16 m/√Hz (수직) (@10 Hz), Pitch 및 Yaw 잡음은 10-17 rad/√Hz (레이저 빔이 테스터 질량 중심에서 1 mm 어긋난다고 가정할 때, @10 Hz 검출주파수에서) 이하로 제어하여야 합니다.
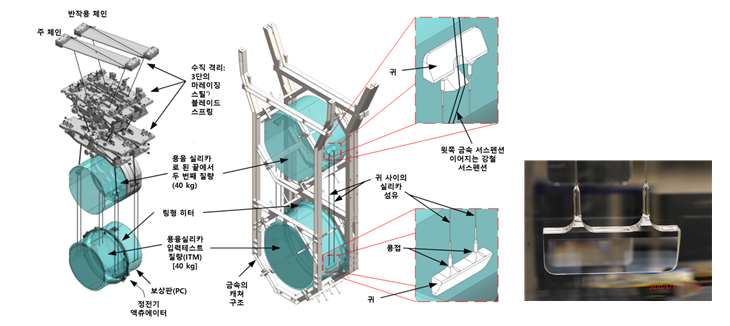
수동식 진동 격리 사중진자 서스펜션
라이고의 거울은 진동으로부터 잘 격리되어 거울과 그 하우징 내 원자의 무작위 움직임도 감지할 수 있어야 합니다. 이러한 수준의 차폐를 달성하기 위해 고급 라이고의 40 kg의 대형의 테스트 질량은 3개 질량 아래에 매달려 사중진자 서스펜션 시스템을 이루고 있습니다초기 라이고에서는 데스트 질량 11 kg이 단일진자 서스펜션으로 되어 있었습니다.[21] 실제로는 이 서스펜션은 수동 및 능동 진동 차단 구성 요소를 모두 사용합니다.
매달린 질량의 두 개의 “체인(주 체인과 반작용 체인)”이 서로 나란히 매달려 있습니다(그림 8). 메인 체인에서 상단 2 개의 질량은 강철로 만들어지고 하단 2개는 순수한 용융 실리카로 만들어집니다 (반작용 체인에서는 상단 실린더도 금속으로 만들어짐). 주 체인의 가장 낮은 쪽에 위치한 질량은 두께 20 cm x 직경 34 cm이고 무게 40 kg인 테스트 질량입니다. 이 실리카 광학유리의 테스터 질량는 반작용 질량과 5 mm 간격을 이루고 있으며 0.4 mm 굵기의 4가닥의 실리카 유리섬유(상하 두 귀에 두 가닥의 유리섬유가 융착된 모노리식 구조이며 이 두 귀는 상하의 두 질량 측면의 광학연마된 평면에 접착제 없이 광학접착되어 있습니다.)에 매달려 있습니다. 이러한 유리섬유는 온도 변화에 따라 팽창하거나 수축하지 않으므로 고출력 레이저 빔에 의해 가열된 테스트 질량의 이러한 열잡음으로부터도 거울을 격리합니다.
테스터 질량의 자세 제어하는 엑츄에이터
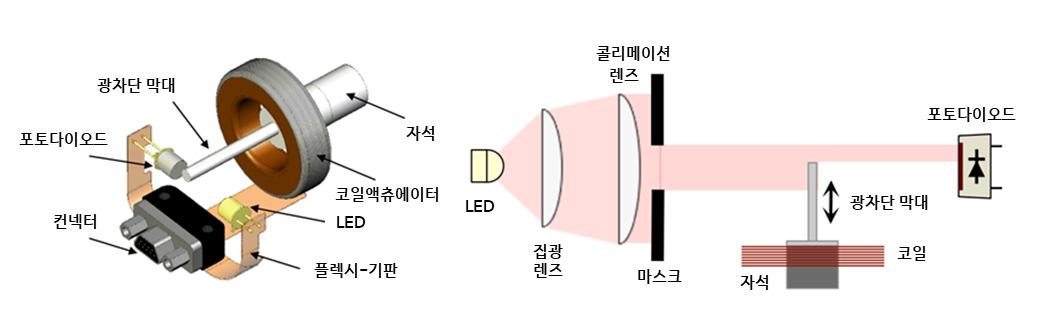
테스터 질량의 자세 제어하기 위한 엑츄에이터로는 정전기 드라이브(ESDs, 그림 9, 10 참조)와 자석-코일 쌍으로 된 전자기 액츄에이터(스피커의 보이스 코일)가 사용됩니다.(그림 9, 11 참조) 간섭계가 효과적으로 작동하려면 라이고의 암 공진기 길이가 피코미터(pm, 1조 분의 1 미터) 이상 변하지 않아야 합니다. 앞에서 기술한 바와 같이, 반작용 체인은 주 체인을 비접촉식으로 자세를 제어하는 액츄에이터의 역할입니다. 테스터 질량 위쪽 두 질량은 움직이는 영구자석과 전기코일에 의해 제어됩니다.(그림 11) 이 ‘보이스 코일voice coil은 오디오 스피커의 진동판처럼 작동하며, 코일은 자석을 끌어당기거나 밀어내는 자기장을 생성하고, 이 자기장 속의 자석은 테스터 질량을 부드럽게 움직여 진동에 대응합니다.
또, 정전기력을 사용한 정전기 액츄에이터(ESD)의 금 기판를 인접하는 반작용 질량에 붙여 테스트 질량를 보다 부드러운 자세 제어를 합니다.
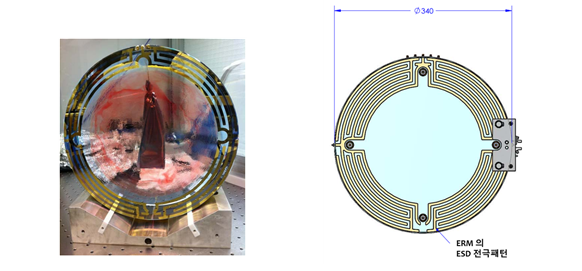
전기용량(캐페시터)의 두 전극 사이에 끼여 있는 유전체는 전기용량 중심 쪽으로 정전기력을 받는데, ESD( Electostatic Driver)는 이 원리를 이용한 것으로 원형의 빗 모양의 전극과 사이에 끼인 4 분할된 4개의 빗 모양 전극으로 만들어진 ESD의 금 기판이 사용되며(그림 10)), 원형 빗 전극에는 접지 전극이, 그 사이에 끼어진 4 개로 사분할된 빗 전극에는 고전압이 걸리고, 이 네 전압의 크기와 극성에 따라 마주보는 테스터 질량의 3개 자유도(피치 pitch, 요 yaw 및 직선 운동)의 제어가 가능하게 됩니다.
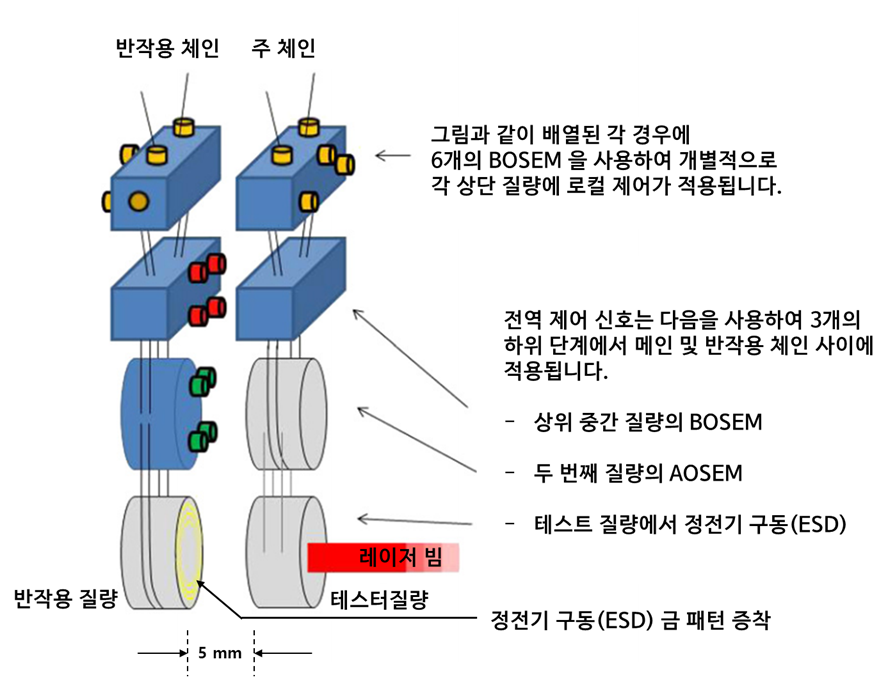
그림 9에는 제일 아래 테스터 질량을 가동시킬 ESD 패턴이 반작용 질량이나 위상판의 한면에 금 코팅되어 테스터 질량의 세 자유도의 제어를 가능하게 하고, 반작용 체인의 아래에서 2 번째, 세번째 질량에는 OSEM(Optical Sensor and Electro-Magnetic 액츄에이터, 그림 9 참조, 광센서가 부착된 전자기 액츄에이터)의 코일이 4개 씩 붙어있고 그 반대면 테스터 질량에는 이에 대응하는 자석이 4개씩 붙어 있습니다.(그림에는 표시 안됨). 코일에는 전역 제어 신호가 입력되어 동작을 제어합니다. 제일 윗부분의 질량에는 각각 6개의 OSEM이 접합되어 개별 동작을 제어합니다.
능동적 지진 격리 플랫 폼
고급 라이고의 사중진자 서스펜션은 원치 않는 진동 잡음에 대한 최후의 방어선이며. 진동에 대한 첫 방어선은 능동적 격리 플랫폼입니다. 이러한 시스템에서 내부 지진 격리(ISIInternal Seismic Isolation) 플랫폼은 영구자석 액추에이터와 함께 다양한 환경 진동 주파수에 맞춰진 위치 및 진동 센서(예: 지진계)를 활용합니다.
여러 개의 이 센서들은 나란히 작동하며 이러한 모든 동작의 효과를 결합한 다음 피드백 시스템을 이용하여 모든 진동을 동시에 상쇄하는 순 반대 동작을 생성하는 신호를 컴퓨터로 보내어 진동을 능동적으로 제어합니다. 이는 소음 제거 헤드폰이 작동하는 방식과 매우 유사합니다. 이 능동적인 격리 수준은 들어오는 진동의 크기를 최대 2·10-13 m 수준으로 줄입니다. 그런 다음 사중진자 서스펜션이 인계받아 이 진동 잡음 수준을 거의 백만 배 더 줄여 라이고가 원하는 검출 감도 10-19 m을 달성하는데 도움이 됩니다.
이러한 방식으로 라이고는 수동 및 능동 진동 격리 시스템을 모두 사용하여 중력파를 검출하는 기능을 용이하게 합니다.
그림 12의 고급 라이고의 전체 조감도를 보면, 중요한 테스트 질량이 있는 4개 부위와 광속분할기BS 1 개 부위는 각각 사중진자 서스펜션에 매달려 있으며 이 5개의 사중진자 서스펜션 시스템은 다시 지진 차단되는 플랫폼 HEPI-격리 플랫 폼 위에 있는 BSC 챔버 안에 설치되고, 기타의 보조 광학계의 6개 부위의 서스펜션 시스템은 다시 각각 HEPI-격리 플랫 폼 위에 있는 HAM 챔버 안의 광학 테이블에 설치됩니다.[26]
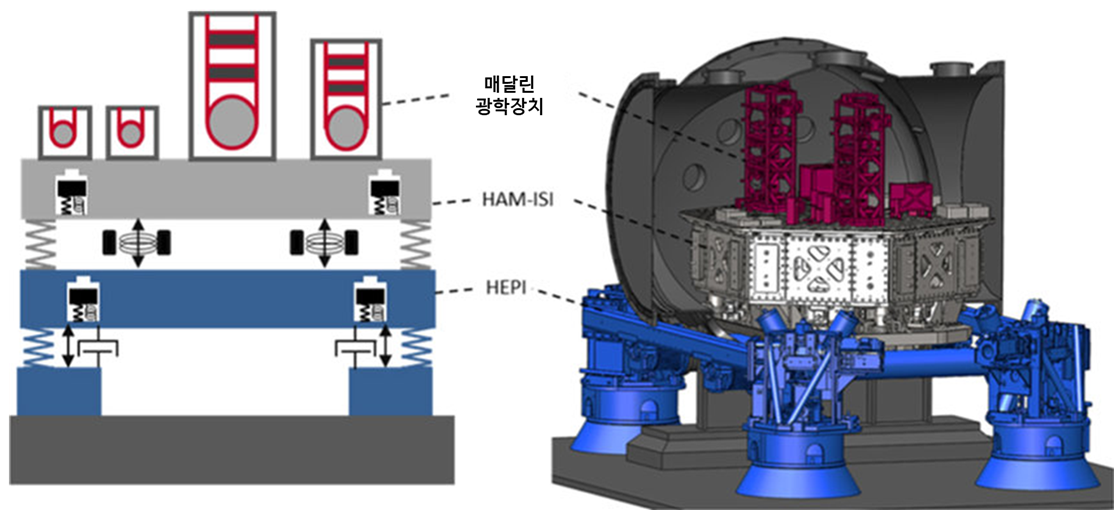
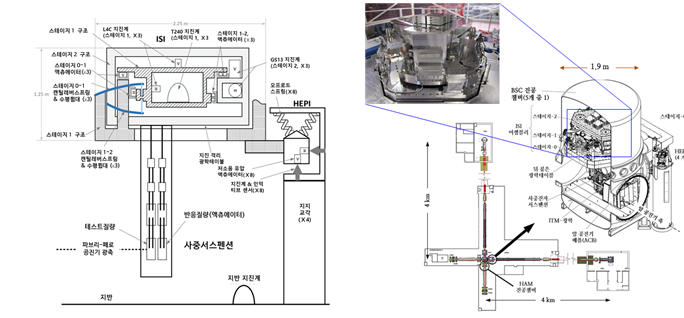
고급 라이고에서는 세 가지 능동적 격리 플랫폼이 설계 제작되었습니다. 각 관측소에서는 1. HEPIHydraulic External Pre-Isolators, 유압식 사전 외부 격리장치라고 하는 11개의 유압 플랫폼이 진공 챔버 외부의 바닥에 사전격리 단계로 사용되고 2. 6개의 HAMHorizontal Access Modules, 수평 접근 모듈이라고 하는 단일 단계 내부 지진 격리장치가 HEPI플랫폼에 위에 장착되어 있으며 진공 챔버 안에 있습니다. 이들은 간섭계의 보조광학 장치를 지지하고 지상 운동으로부터 격리하며 진공챔버 내부에 있으므로 HAM-ISI 플랫폼Internal Seismic Isolation platform for HAM chambers이라고 합니다. (그림 13 참조) 3. 또 HEPI 플랫폼에 위에 장착되는 5개의 2단 격리 장치인 BSCBasic Symmetric Chambers, 기본 대칭 챔버라고 하는 챔버가 있습니다. 이들은 간섭계의 핵심광학 장치를 지면 움직임으로부터 분리하며 진공챔버 내부에 있으므로, BSC 지진 내부 격리장치(BSC-ISIBSC-Internal Seismic Isolation)플랫폼이라고 합니다. (그림 14 참조)
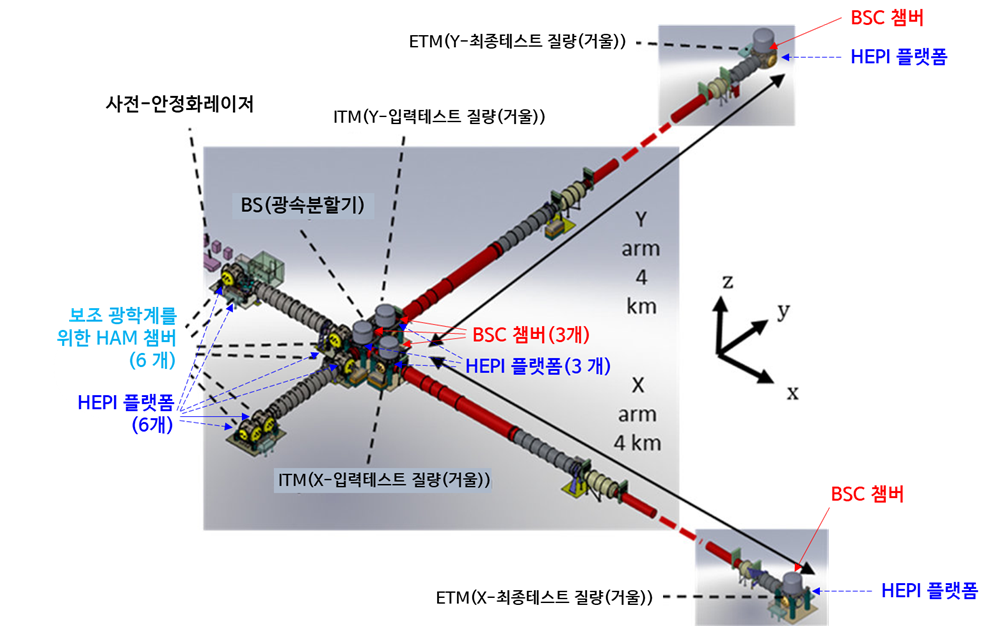

a)의 가운데의 코너 스테이션과 양끝 단인 엔드 스테이션은 직경 1.2 m x 길이 4 km의 빔 튜브로 연결되어 있습니다. 빔 튜브는 5 mm(rms) 크기의 진직도로 직선 정렬되며 또, 암은 5 μrad 이내의 값으로 서로 직교합니다. 그림의 가운데 3개와 양 끝단의 각각 1개, 모두 5개의 챔버 안에는 광속분할기와 테스터 질량이 각각 사중진자 서스펜션 시스템에 매달려 있고 이들은 각각 BSC-ISI 챔버 위에 장착되며 BSC-ISI는 다시 HEPI 플랫폼에 설치됩니다. 6개의 보조광학 장치들은 광학 테이블 위에 고정되고 이들은 서스펜션에 매달리고 다시 이 서스펜션은 HAM-ISI 챔버 안에 설치되고 다시 HEPI 격리 플랫폼 위에 장착이 됩니다.
초고진공 시스템 [27, 28]
라이고의 광학은 부피 10,000 m3의 거대한 진공 챔버 안에 조용히 상주합니다. 챔버 안의 가스 밀도의 요동에 의한 레이저 빔의 회절, 거울에 전달되는 음향 잡음, 물 분자의 거울에의 흡착 등으로 인한 레이저의 위상잡음을 줄이기 위하여 챔버 안의 내부 진공도는 10-9 Torr 정도의 초고진공으로 유지하여야 합니다. 광학계에 오염이 없는 상태에서 거울에서의 광흡수가 0.1 ppm 이하, 탄화수소 증착이 단층/10년 이하가 요구되며, 모든 구성 요소의 적극적인 세척 및 진공 베이킹으로 10 µm 미립자가 1개도 검출되면 않아야 하며, 작업자 액세스를 위한 ISO 클래스 5 이상의 클린룸이 필요하며, 진동없는 환경이 필요합니다.
라이고의 진공관을 이상적인 작동 압력으로 공기와 가스를 배출하는 데 40일의 지속적인 펌프 다운이 필요했습니다. 터보 펌프로 튜브의 공기 대부분을 제거하고 전체 길이 8 km가 넘는 챔버 자체를 저항을 갖는 발열체로 활용하며, 챔버를 500 m 씩 나누어 양단에 2,000 암페어 65 볼트의 전압으로 옴-히팅 원리를 이용하여, 160 °C로 가열하여 3주 동안 잔류 가스와 물 분자를 액체 질소 극저온 펌프로 배출합니다. 3주 동안의 히팅에 13억원(백만불)의 전기료가 사용되었습니다.
검출 실험 중에는 기계식 펌프, 터보 펌프, 디스플레이서-피스톤 극저온 펌프(displacer-piston cryo pumps)는 동작하지 않으며, 진공을 지속적으로 유지하려면 정교한 모니터와 제어가 필요하며 진공 시스템 내부에 있는 튜브 및 기타 구조와 구성 요소에서 방출되는 분자를 추출하는 무진동의 이온 펌프의 지속적인 작동이 필요합니다.
빔 튜브 설치
라이고의 암은 충분히 길어서 진공관을 설치할 때 지구 자체의 곡률이 복잡한 요소였습니다. 라이고의 토목 엔지니어가 수평 경로를 매끄럽게 하고 각 암의 튜브를 직선으로 조립하는 것만으로는 충분하지 않았습니다. 완벽하게 평평한 빔 경로를 보장하기 위해 지구의 곡률 (각 암 공진기 길이에 걸쳐 수직으로 1 미터 이상)은 GPS 측량기의 지원으로 바닥이동 측정 및 고정밀 콘크리트 작업으로 대응되었습니다.
간섭계 아래의 75 cm두께의 철근 콘크리트 바닥은 지진 진동을 최소화합니다. 직경 1.2 m의 빔 튜브는 20 m 세그먼트로 제작되었습니다. 각각은 두께가 3 mm에 불과한 평평한 강철의 연속 리본으로 만들어졌으며 종이 타월 튜브와 유사한 실린더로 용접되었습니다. 수학적으로 완벽한 형태의 실린더는 붕괴되지 않지만 실제 튜브의 작은 결함으로 인해 지구 대기의 엄청난 압력으로 인해 구부러질 수 있으므로 라이고의 튜브는 죄임에 대한 상당한 저항을 제공하는 보강재인 헬리칼 링에 의해 지지됩니다.
이상에서 살펴본. 광학적인 파브리-페로 마이켈슨 간섭계, 출력 및 주파수 사전 안정화된 출력 증폭 레이저, 모드클리너, 출력 및 신호 재활용 공진기들과, 기계적인 진동 제어 장치인 3종의 능동적 지진 격리 플랫 폼 및 수동식 진동 격리기인 사중진자 서스펜션 시스템과 초고진공 시스템과 같은 물리적 장치 외에도 중력파 검출 시스템은 다음과 같은 물리적 환경 모니터링, PEM 시스템 및 제어 및 데이터 수집 시스템을 운영하고 있습니다.
라이고의 물리적 환경 모니터링, PEM
라이고 현장의 환경은 그림 17과 같은 물리적 및 환경 모니터링(PEM) 시스템에 의해 모니터링됩니다. 이 시스템은 환경 교란을 정밀하게 측정하도록 설계된 민감한 기기 네트워크로 구성됩니다. PEM 시스템에 대한 상세한 내용은 pem.ligo.org 를 참조하세요.
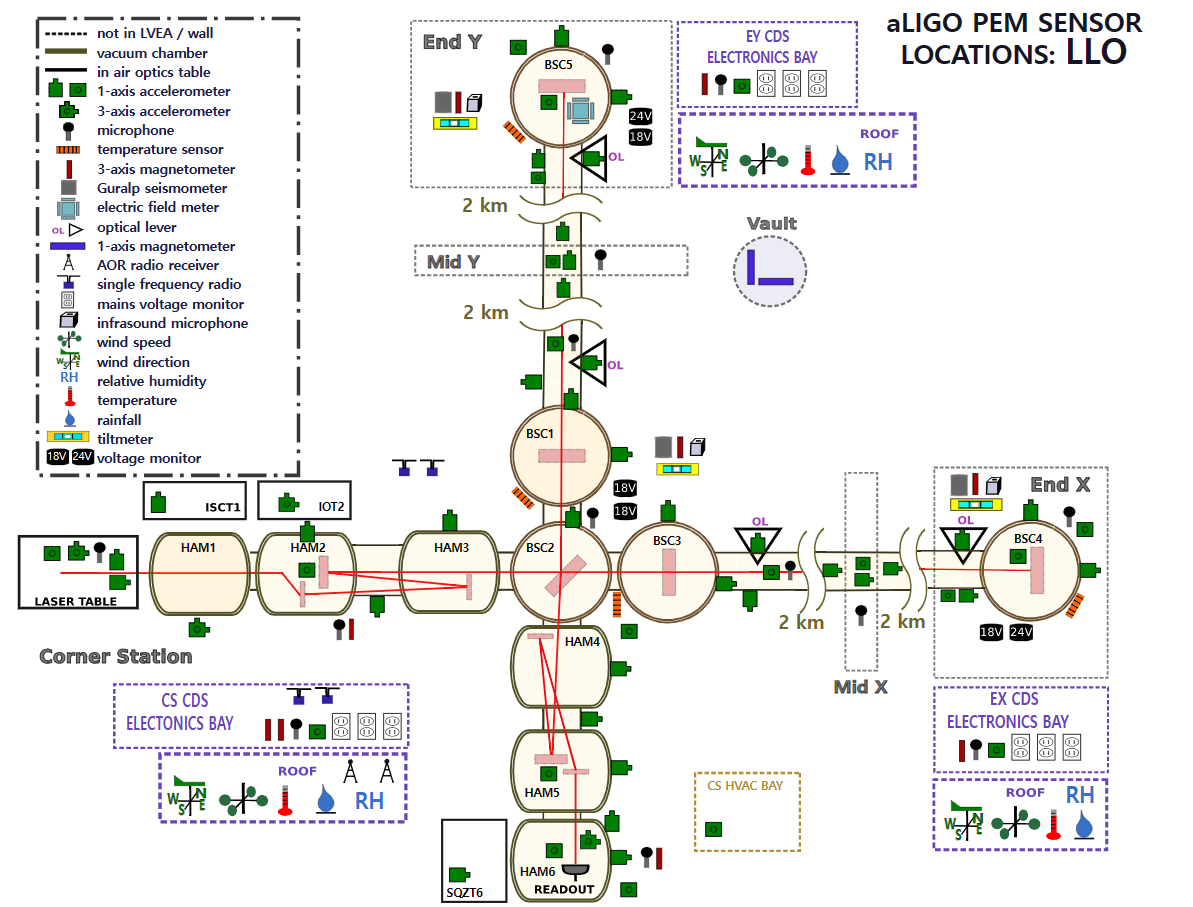
테스트 질량은 진공 챔버 BSC1/3(ITM) 및 BSC4/5(ETM)에 있고 광속분할기는 BSC2에 있습니다. 왼쪽 상단의 상자 안에는 실시간 모니터링하고 있는 물리량들의 목록이 적혀 있습니다.
제어 및 데이터 수집
많은 하위 시스템에서는 실시간으로 디지털 제어합니다. 그리고 보관 및 분석을 위해 다른 하위 시스템과 각 채널의 데이터를 실시간으로 수집해야 합니다. 이러한 요구 사항을 충족하기 위해 전용 데이터 수집 및 제어 아키텍처를 그림 18과 같이 구성하였습니다.
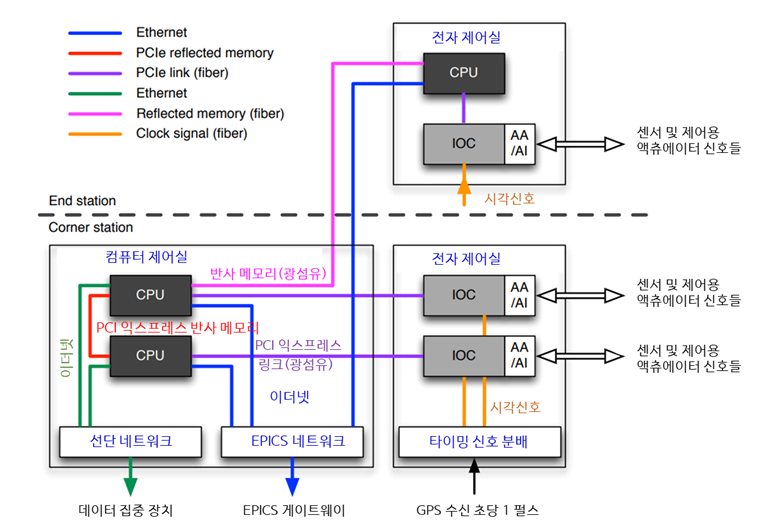
간섭계의 각종 센서 및 제어용 액츄에이터 신호는 전용 IOC(입출력 섀시(회로))를 통해 전달됩니다, 각 IOC에는 17슬롯 PCI Express(PCIe) 백플레인이 있습니다. 간섭계 타이밍 분배 시스템과 동기화되는 65,536 Hz의 타이밍 모듈이 있으며 상용 광섬유 PCIe를 통하여 실시간 제어 컴퓨터에 접속됩니다.
PCIe 슬롯에는 각 IOC를 위해 특별히 다중 채널, 동시 샘플이 가능한 16비트 아날로그-디지털 변환기(ADC) 및 16 및 18 비트 디지털-아날로그 변환기(DAC)들로 구성됩니다.
맞춤형 안티-앨리어싱 및 안티-이미지 필터는 ADC와 DAC 및 아날로그 신호들 사이에 삽입되어 구성됩니다. IOC(입축력 섀시(회로)) 및 필터들은 민감한 간섭계 구성 요소와의 전자 및 음향 간섭 영향을 줄이기 위해 진공 챔버 영역과는 별도의 공간에 설치합니다.
실시간 제어 컴퓨터는 간섭계에서 더 멀리 떨어진 별도의 컴퓨터실에 있으며 광섬유를 통해 접속됩니다. 컴퓨터는 실시간 작동과의 호환성을 위해 특별히 선택된 상업용 멀티코어 랙 마운트 장치입니다. 제어할 수 없는 시스템 인터럽트가 없어야 하고 필요한 수의 PCIe 모듈을 수용할 수 있어야 합니다.
이 시스템은 최대 65,536 Hz의 서보 루프 속도로 처리하도록 설계되었습니다. 이를 위해서는 실시간 실행이 몇 마이크로초 이내에 정확하게 처리 가능하며 사이트 전체에 동기화되어 있습니다. 이 성능을 달성하기 위해 GPL Linux 운영 체제가 제어 컴퓨터에서 사용되지만, 라이고사용자 정의 커널 패치가 있습니다.리눅스 운영체계와 반사메모리 스레드를 이용한 핵융합을 위한 토카막의 플라즈마 제어기술이 국내 연구원들이 의해 보고되어 있습니다[19] 이 패치는 실시간 제어 프로그램에 의한 독점 사용을 위해 Linux 시스템에서 지정된 CPU 코어를 분리할 수 있도록 합니다.
특정 하위 시스템에서 데이터 수집 및 제어 프로그램은 실시간 코드 생성기(RCG)의 도움으로 생성됩니다. RCG는 맞춤형 소프트웨어 모듈 세트를 제공할 뿐만 아니라 많은 MATLAB Simulink 부품을 지원합니다. Simulink를 GUI로 사용하여 원하는 실행 순서를 실행하는 그래픽 모델로 코드를 개발합니다. 그러면 표준 스크립트가 모델에서 실행 가능한 소프트웨어를 생성합니다.
주요 RCG 구성 요소는 IIR(무한 임펄스 응답) 필터 모듈로, 제어 전달 기능 및 채널 보정을 정의하는 데 사용됩니다. 주어진 제어 모델은 이러한 모듈을 수백 개 포함할 수 있으며 각 모듈은 최대 10개의 2차 섹션 필터를 포함합니다. 이 시스템은 런타임 중에 필터 계수의 재로드를 지원하므로서 새 필터를 즉시 구현할 수 있습니다.
RCG 모델 간의 실시간 통신은 여러 수준에서 제공됩니다. 동일한 컴퓨터에서 실행되는 응용 프로그램의 공유 메모리를 통해; 서로 300 m 이내에 위치한 컴퓨터의 경우 PCIe 네트워크를 통해; 4 km 떨어져 있는 컴퓨터의 반사 메모리 네트워크 등을 통해 제공됩니다.
각 CPU의 코어 하나는 IOP(I/O 프로세서)라는 특수 모듈용으로 할당되어 있습니다. IOP는 I/O 하드웨어 모듈에 대한 인터페이스를 처리하고 사용자 코드 실행을 위해 간섭계 타이밍 시스템과 동기화합니다. 간섭계 타이밍 시스템[30]은 65,536 Hz 클럭(시각) 신호를 모든 IOC에 분배합니다. 이 클럭은 GPS 시각과 동기화됩니다. RCG 모델 간의 실시간 통신을 위한 타임 스탬프를 제공하기 위해 타이밍도 프런트 엔드 컴퓨터에서 제공됩니다.
제어 시스템은 또한 EPICS(Experimental Physics and Industrial Control System) 소프트웨어를 사용하여 실시간 제어 시스템과 사용자 인터페이스 간의 통신 프로토콜을 제공합니다.
그림 18에는 나와 있지 않지만 느린 제어 하드웨어(스위치 설정, 느린 리드백 등)의 대부분은 EtherCAT(제어 자동화 기술용 이더넷) 시스템으로 관리됩니다.
가디언(Guardian)으로 알려진 맞춤형 계층적 상태 머신은 간섭계의 전 시스템을 제어합니다. 파이썬(Python)으로 작성된 가디언(Guardian)은 각각 계측기의 고유한 하위 도메인에서 자동화를 처리하는 분산된 자동화 노드 세트로 구성되며, 각 노드에는 하위 도메인의 동역학을 설명하는 방향성 상태 그래프가 로드됩니다.
계층 구조의 최상위에 있는 마스터 관리자 노드는 여러 하위 관리자 노드를 제어합니다.
이들은 차례로 EPICS를 통해 기기를 직접 제어하는 계층 구조의 맨 아래에 있는 장치 레벨 노드와 통신하며 가디언은 간섭계 각종 잠금 획득의 자동화전체 간섭계 시스템에는 300여 개의 파라미터에 대한 자동화 잠금이 동작되고 있습니다.와 저소음 작동으로의 후속의 전환을 제공합니다.
최종 고급 라이고의 검출 감도와 최초의 중력파 검출
핸포드와 리빙스턴에 있는 두 고급 라이고의 레이저 간섭계는 전술한 구조와 성능의 시스템를 갖추고 있으며 간섭계의 각 하위 시스템의 자동 잠금 획득 체계가 모두 구현되었고, 이들을 시운전 하였을 때의 중력파 변형 감도는 90 Hz ~ 500 Hz 주파수 대역에서 10-23 까지 개선되었습니다. 고급 라이고의 중앙 통제실에서의 검출기의 변형 감도 스펙트럼은 실시간으로 모니터링되고 있습니다.(그림 19의 가운데 윗 사진 부분)
중력파 검출을 위한 변형 감도가 이와 같이 천체물리학적으로 중요한 수준에 도달한 라이고 간섭계는 BBH(쌍성 블랙홀)의 합병에 의한 중력파 검출 실행으로 작동되었습니다. 2대의 고급 라이고의 첫 번째 검출 실행으로 2015년 9월 14일 드디어 최초의 중력파 검출에 성공할 수 있었습니다.

앞 정면 상단의 모니터에 나타나는 변형 감도스펙트럼을 실시간으로 작동 및 관리하고 있다.
정리
이상에서와 같이 우리는 중력파 검출을 위한 레이저 간섭계 측정시스템과 여러 하부 시스템, 물리 환경 모니터링 시스템, 데이터 수집 및 제어 시스템에 대하여 살펴보았습니다.
레이저 간섭계와 이들 하부 시스템들이 종합적으로 결합된 고급 라이고 검출기와 더불어, 레이저와 간섭계의 동작과 간섭무늬 신호 판독으로 이어지는 중력파 검출과 중력파 신호 교정 등에 대해서는 계속되는 아티클에서 이야기하도록 하겠습니다.
참고문헌
[1] WSU: 100 Years of Gravitational Waves with Rai Weiss, WSU: 100 Years of Gravitational Waves with Rai Weiss – YouTube
[2] 인하대 물리학2 27강 일반상대성이론 27J 중력파, 인하대물리2 27J중력파 – YouTube
[3] Gravitational Waves Detected 100 Years After Einstein’s Prediction February 11, 2016, 2016-02-11 Gravitational Waves Detected | Media Assets (caltech.edu)
[4] L. A. M. Johnson, et. al., Metrologia, 52, 1, 62, 2015.DOI 10.1088/0026-1394/52/1/62
[5] T. Bothwell.et.al., Metrologia 56 (2019) 065004 (16pp)
[6] Aasi J et al (LIGO Scientific Collaboration) (2015) Class Quantum Grav 32:074001. arXiv:1411.4547
[7] Acernese F et al (Virgo Collaboration) (2015) Class Quantum Grav 32:024001. arXiv:1408.3978
[8] Abbott, B,,P, et. al., Phys Rev Lett 116:061102. https:// doi.org/ 10.1103/ Phys. Rev. Lett. 116.061102
[9] Hughes S A et al, Proc. 2001 Snowmass Meeting (Preprint astro-ph/0110349). arXiv:astro-ph/0110349,
[10] 이형목, 중력파 검출의 의의와 전망, 물리학과 첨단과학 March 2016, 2-7. [11] Chiang-Mei Chen, et. al., arXiv:1610.08803 [gr-qc] 22 Nov. 2016, https://doi.org/10.1016/j.cjph.2016.10.014
[12] 오정근, 강궁원, ‘중력파 검출의 역사’, 물리학과 첨단기술, March 2016, 8-15 [13] R. Weiss, Quarterly Progress Report No. 105, April 15, 1972, Research Laboratory of Electronics (RLE) of MIT (LIGO-P720002-00-R) [14] 오정근, 우주를 탐구하는 새러운 창: 중력파 천문학의 시대를 열다, 물리학과 첨단기술, November 2013, 42-48.
[15] 오정근 저, 중력파, 2016 동아시아
[16] https://www.ligo.caltech.edu/system/media_files/binaries/313/original/LIGOHistory.pdf
[17] V. Pound, Rev. Sci. Instrum 17, 490, 1946
[18] R. W. P. Drever, et. al.,,Appl. Phys. B 31, 97–105 (1983)
[19] J. L. Hall, et. al., Appl. Phys. Lett. 39(9) 1, 680, November 1981
[20] P. Kwee et. al., .Vol. 20, No. 10, OPTICS EXPRESS 10617l, 7 May 2012
[21] Aston S M et al., 2012 Class. Quantum Grav. 29 235004
[22] Hewitson H, et. al., 2007 Class. Quantum Grav. 24 6379—6391
[23] S M Aston, et. al., , Class. Quantum Grav. 29 (2012) 235004 (25 pp) http://dx.doi.org/10.1088/0264-9381/29/23/235004
[24] H Wittel et. al., Class. Quantum Grav. 32 (2015) 175021 (11pp)
[25] L. Carbone et. al., Class. Quantum Grav. 29 (2012) 115005, arXiv:1205.5643 [gr-qc]
[26] F. Matichard et al., 2015 Class. Quantum Grav. 32 185003 arXiv:gr-qc/0405070
[27] presentation to the Southern California Chapter AVS 28 March 2017, Vacuum Technology of the LIGO Interferometers PowerPoint Presentation (ligo.org)
[28] Ultra-High Vacuum | LIGO Lab | Caltech
[29] S.Y. Park, et. al., High-speed data handling using reflective memory thread for tokamak plasma control, Proceedings of ICALEPCS 2011, Grenoble, France MOPKS021
[30] Bartos I et al 2010 Class. Quantum Grav. 27 084025