주어진 데이터를 설명하는 최소한의 모형은 어떤 모습일까?
앞선 세 번의 연재에서는 그래프 기반의 신경망 모형을 소개하고, 정보이론을 통해서 이들의 학습과정을 살펴보았다. 이번 글에서는 모형으로부터 자유로운 통계학적인 학습을 살펴보겠다.
\(L\)개의 관찰 데이터 \(\{x(t)\}_{t=1}^L\)가 주어졌다고 하자.1 이런 데이터를 생성하는 시스템이 가지는 가장 그럴듯한 분포 \(P(x)\)는 어떤 모습일까? 아마도 우리가 상상할 수 있는 가장 원시적인 분포는 주어진 데이터의 빈도수일 것이다.
\begin{equation}
\tag{1}
P_0(x=\underline{x}) = \frac{1}{L} \sum_{t=1}^L \delta(\underline{x} – x(t))\end{equation}
이는 데이터 \(\{x(t)\}_{t=1}^L\) 가운데 \(\underline{x}\)에 해당하는 것이 몇 개인지 세는 상대적인 빈도수를 나타내는 표현이다. 그리고 주어진 데이터의 통계량인 평균을 살펴볼 것이다.
\begin{equation}
\tag{2}
X_0 = \frac{1}{L} \sum_{t=1}^L x(t) = \sum_x x P_0(x)
\end{equation}
우리가 찾고 있는 시스템의 모분포 \(P(x)\)는 가능하면 \(P_0(x)\)에 가깝고 평균 \(X=\sum_x x P(x)\)는 \(X_0\)에 가까운 값을 주는 분포로 기대가 된다.
여기서 한 걸음 더 나가려면 두 확률분포 사이의 거리를 정의해야 한다. 여러 가능성 가운데 쿨백-라이블러 발산Kullback-Leibler divergence를 생각해보자.
\begin{equation}
\tag{3}
D_{KL} (P||P_0) = \sum_x P(x) \log \frac{P(x)}{P_0(x)}
\end{equation}
이렇게 정의한 거리 \(D_{KL} (P||P_0) \geq 0\)는 일단 항상 양수이고, \(P(x)=P_0(x)\)가 되는 조건에서만 거리가 \(0\)이 되므로 꽤 괜찮은 선택처럼 보인다. 사실은 최고의 선택이다. 공간에서 두 점 사이의 거리를 다루는 리만기하학을 일반화해서 함수공간에서 두 분포함수 사이의 거리를 다루는 정보기하학information geometry이라는 분야가 있다. 정보기하학에 따르면 \(D_{KL}(P||P_0)\)로 정의한 거리는 (i) \(x\)의 해상도binning에 의존하지 않고, (ii) 일반적인 의미에서의 피타고라스 정리를 만족하는 유일한 선택이다.[1] 정보기하학은 슌이치 아마리Shun-ichi Amari 선생님을 비롯한 분들의 꾸준한 기여로 최근 머신러닝을 이해하는 언어로 주목받고 있다.[2]
영상 아마리 선생님의 유튜브영상
쿨백-라이블러 발산을 조금 정리하면 다음처럼 표현할 수 있다.
\begin{align}
D_{KL} (P||P_0) &= \sum_x P(x) \log \frac{1}{P_0(x)} – \sum_x P(x) \log \frac{1}{P(x)} \nonumber \\
&= \mathbb{E} \bigg[\log \frac{1}{P_0(x)} \bigg]_P – \mathbb{E} \bigg[\log \frac{1}{P(x)} \bigg]_P
\tag{4}
\end{align}
이는 \(P_0(x)\)분포가 가지는 정보의 기대값에서 \(P(x)\)분포가 가지는 정보의 기대값의 차이에 해당한다. 이런 의미에서 쿨백-라이블러 발산은 상대적 엔트로피relative entropy라고도 불린다. 여기서 두 정보량의 기대값 계산에서 모두 정답에 해당하는 모분포 \(P(x)\)의 입장에서 계산했다는 점을 주목하자. 이렇게 보면 거리함수 \(D_{KL}(P||P_0) \neq D_{KL}(P_0||P)\)가 \(P(x)\)와 \(P_0(x)\)에 대해 대칭이 아니라는 것이 실수가 아니라 신의 한 수임을 자연스럽게 이해할 수 있다. 이제 거리함수 \(D_{KL}(P||P_0)\)를 이용해서 우리 문제를 형식화해보자.
\(\sum_x x P(x) = X\)를 만족하면서 \(P_0(x)\)에 가까운 분포 \(P(x)\)는 무엇인가?
이렇게 제한 조건이 있는 최적화 문제는 라그랑주 승수법을 써서 푼다.
\begin{equation}
\tag{5}
\mathcal{L} = D_{KL}(P||P_0) – \theta \cdot \bigg( \sum_x x P(x) – X \bigg)
\end{equation}
이 목적함수를 최소화시키는 \(P(x)\)를 계산하면 다음과 같은 지수함수를 얻게 된다.[3]
\begin{equation}
\tag{6}
\label{eq:boltzmann}
P(x) = \frac{P_0(x) \exp(\theta \cdot x)}{Z}
\end{equation}
분모 \(Z=\sum_x P_0(x) \exp(\theta x)\)는 \(\sum_x P(x)=1\)을 만족하기 위해 도입한 정규화 상수이다. 이 분포의 매개변수인 라그랑주 승수 \(\theta\)는 제한 조건 \(\sum_x x P(x) = X\)을 만족하도록 결정한다. 여기서 \(X=X_0\)인 제한 조건을 만족하는 경우는 \(\theta=0\)이 되고, 당연하게도 \(P(x)=P_0(x)\)라는 결론을 확인할 수 있다. 하지만 우리가 관심이 있는 상황은 \(X\)가 \(X_0\)에서 조금 벗어난 데이터에 대한 \(P(x)\)이다.
흥미로운 식 (6)을 몇 가지 상황에서 음미해 보자. 첫째, 데이터가 각 샘플의 상태 \(x\) 자체가 아니라 이 상태에 해당하는 어떤 물리량 \(E(x)\)를 측정한 경우를 생각해 보자. 그리고 \(P_0(x)\)에 대한 정보가 아무것도 없어서 모든 상태 \(x\)가 같은 확률로 나타날 수 있는 상황을 가정해 보자. 그러면 측정한 \(E(x)\)의 평균 \(U = \sum_x E(x) P(x)\)가 제한된 조건에서 \(P_0(x)\)=상수에 가장 가까운 분포를 얻으면 \(P(x)=Z^{-1} \exp[-\beta E(x)]\)라는 통계역학의 볼츠만 분포를 얻게 된다. 여기서 물리량 \(E(x)\)는 에너지에 해당하고, \(\theta = -1/\beta\)에 해당한다. 이 경우 \(P(x)\)는 \(1/\beta\)라는 온도에서 평균 에너지 \(U\)를 가지는 평형상태의 분포가 된다. 여기서 열역학에 기반을 둔 통계역학과 정보이론에 기반을 둔 데이터사이언스의 접점이 생긴다.
둘째, 제한조건이 두 개 있는 경우를 생각해 보자. \(x\)의 1차 모멘트 \(\sum_x x P(x)\)와 더불어 2차 모멘트 \(\sum_x x^2 P(x)\)도 제한조건으로 들어오는 경우는 \(P(x) = Z^{-1} \exp(\theta_1 x + \theta_2 x^2)\)가 정규분포 또는 가우시안분포가 된다.2 이는 평균과 분산을 측정한 실험결과를 설명하는 최소한의 모형으로 정규분포를 가정하는 것에 대한 정보이론적인 정당화이다.
셋째, \(x = (x_1, x_2, \cdots)\)가 2차원 이상의 벡터이고 관찰한 물리량이 \(x_i\)의 평균 그리고 상관관계로 불리는 \(x_i x_j\)의 평균이었다고 하면 \(P(x) = Z^{-1} \exp(\sum_i b_i x_i + \sum_{i>j} W_{ij} x_i x_j)\)와 같은 홉필드 모형을 자연스럽게 얻게 된다. 이 경우 라그랑주 승수는 \(\theta = (b_i, W_{ij})\)에 해당한다.
샛길로 빠졌는데, 다시 우리의 문제에서 얻은 식 (6)으로 돌아가자. 정규화 상수 \(Z\)는 통계역학에서는 분배함수partition function로 불리고, \(Z\)에 로그를 취하면 적률생성함수 \(F(\theta)=\log Z(\theta)\)가 된다. 적률생성함수에 미분을 취하면 \(x\)의 모멘트의 기대값을 편리하게 얻을 수 있다. 가령, 1차 모멘트의 기대값은 \(F(\theta)\)를 \(\theta\)에 대해서 한 번 미분을 해서 다음과 같이 계산할 수 있다.
\begin{align}
\frac{\partial F(\theta)}{\partial \theta} &= \frac{1}{Z(\theta)}\frac{\partial Z(\theta)}{\partial \theta} \nonumber \\
&= \sum_x \frac{xP_0(x) \exp(\theta \cdot x)}{Z(\theta)} = \sum_x x P(x) = X
\tag{7}
\end{align}
마찬가지로 고차 모멘트의 경우는 \(\theta\)에 대해 여러 번 미분을 해서 얻을 수 있다. 즉, 적률생성함수 \(F(\theta)\)는 확률분포 \(P(x)\)에 대한 모든 정보를 가지고 있다고 생각할 수 있다. 따라서 지금부터 우리는 \(P(x)\) 대신 \(F(\theta)\)를 찾을 것이다.
여기서 이런 질문을 해보자. 데이터의 평균값 \(X_0\)가 조금 바뀌면 우리의 분포 \(P(x)\)는 어떻게 될까? 물론 라그랑주 승수인 \(\theta\)를 조정하면 \(P(x)\)와 평균값 \(X\)를 변화시킬 수 있다. 우리는 수학적인 도구로 도입한 \(\theta\) 대신 데이터의 평균 \(X\)를 직접적인 변수로 제어할 수 있을까? \(F(\theta)\) 대신 \(G(X)\)라는 함수를 르장드르 변환Legendre transformation을 통해서 얻을 수 있다.
\begin{equation}
\tag{8}
F(\theta) + G(X) = \theta \cdot X
\end{equation}
적률생성함수 \(F(\theta)\)의 르장드르 변환함수인 \(G(X)\)는 사실 조금 계산을 해보면 상대적 엔트로피인 \(D_{KL}(P||P_0)\)에 해당함을 확인할 수 있다.
\begin{align}
D_{KL}(P||P_0) &= \sum_x P(x) \log \frac{P(x)}{P_0(x)} \nonumber \\
&= \sum_x P(x) \log \frac{\exp(\theta \cdot x)}{Z} \nonumber \\
&= \sum_x \theta \cdot x P(x) – \log Z \nonumber \\
&= \theta \cdot X – F = G(X)
\tag{9}
\end{align}
식 (8)에서 \(\theta\)와 \(X\)의 쌍대성에 의해 식 (7)의 \(\partial F/\partial \theta = X\)는 다음 식이 됨을 유추할 수 있다.
\begin{equation}
\tag{10}
\frac{\partial G}{\partial X} = \theta
\end{equation}
이렇게 얻은 엔트로피 \(G(X)\)는 데이터에 대한 많은 정보들을 함축하고 있다. 현재 우리의 관찰결과인 \(P_0(x)\)에서 얻은 평균이 \(X_0\)이다. 현재 데이터가 위치하는 곳은 \(\theta=0\) 또는 \(X=X_0\)라고 간주할 수 있다. 그리고 이곳이 바로 오목함수 \(G(X)\)가 최소가 되는 \(G(X_0)=D_{KL}(P_0||P_0)=0\)인 지점에 해당한다.
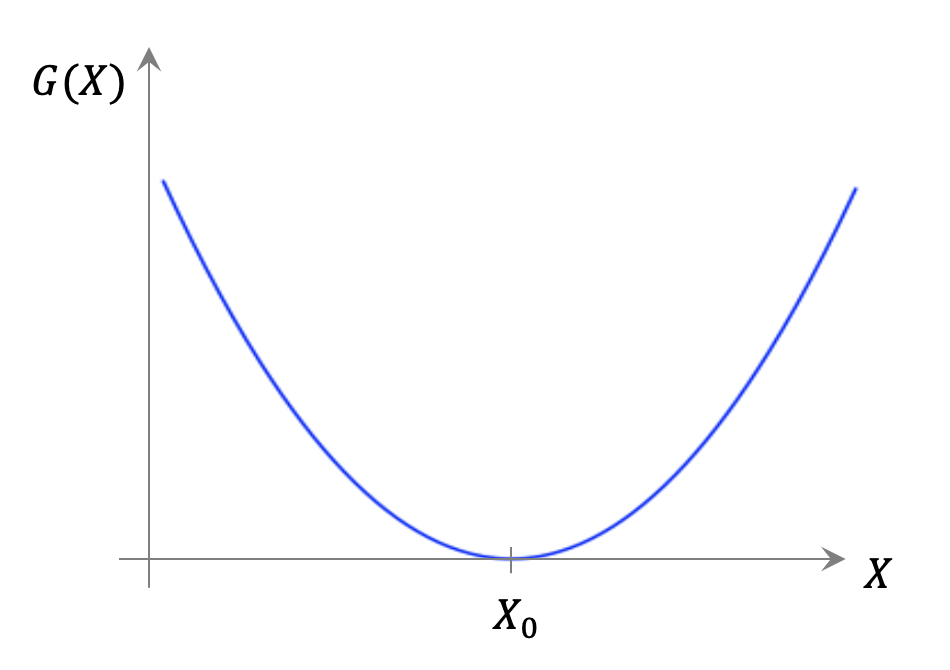
우리는 전체 \(X\) 공간에 대한 \(G(X)\)의 모습보다는 현재 관찰 데이터가 위치하는 \(X=X_0\) 주변에 관심이 있기 때문에, 테일러 전개Taylor expansion를 통해서 \(G(X)\)의 국지적 모습을 얻을 수 있다.
\begin{align}
G(X) &\approx G(X_0) + \frac{\partial G}{\partial X}(X-X_0) + \frac{1}{2} \frac{\partial^2 G}{\partial X^2}(X-X_0)^2 \nonumber \\
&\approx \frac{1}{2} C^{-1}(X-X_0)^2
\tag{11}
\end{align}
여기서 테일러 급수의 0차항은 \(G(X_0)=0\)으로 사라지고, 1차항 역시 \(X=X_0\)에서 기울기 \(\partial G/\partial X=\theta\)가 \(0\)으로 사라지게 된다. 이는 \(X=X_0\)에서 \(G(X)\)가 최소이므로 당연한 결과이다. 테일러 전개의 2차항의 계수는 \(G(X)\)의 곡률에 해당하는 것으로 사실 데이터 \(\{x(t)\}\)의 분산 \(C\)의 역수이다.
\begin{equation}
\tag{12}
\frac{\partial^2 G}{\partial X^2}=\frac{\partial}{\partial X} \bigg( \frac{\partial G}{\partial X} \bigg) = \frac{\partial \theta}{\partial X}
\end{equation}
여기서 \({\partial \theta}/{\partial X}\)의 역수를 계산해 보자.
\begin{equation}
\tag{13}
\frac{\partial X}{\partial \theta}=\frac{\partial}{\partial \theta} \bigg( \sum_x x P(x) \bigg)= \frac{\partial}{\partial \theta} \bigg( \sum_x \frac{x P_0(x) \exp(\theta \cdot x)}{Z(\theta)} \bigg)
\end{equation}
이 관계에서 \(X=X_0\) 또는 \(\theta=0\)에서 아래 결과를 쉽게 확인할 수 있다.
\begin{align}
\bigg( \frac{\partial X}{\partial \theta} \bigg)_{\theta=0} &= \sum_x x^2 P_0(x) – \bigg( \sum_x x P_0(x) \bigg)^2 \nonumber \\
&= \mathbb{E}[x^2] – \mathbb{E}[x]^2 = C
\tag{14}
\end{align}
\(x\)가 2차원 이상의 벡터인 경우 \(C\)는 공분산covariance 행렬에 해당한다. 이로써 우리는 주어진 데이터에 해당하는 엔트로피 함수 \(G(X)\)를 식 (11)에서 완전히 정의할 수 있게 되었고, 이 함수의 기하학적 모양에서 데이터에 대한 정보를 마음껏 추출할 수 있게 된다.
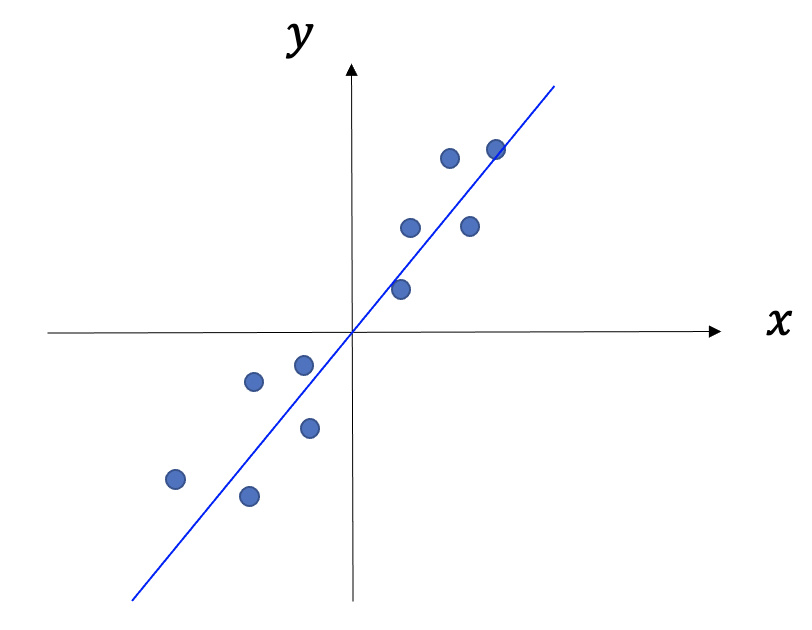
예제
짝을 이루는 데이터 \(\{ x(t), y(t)\}\)의 선형모형 \(y = Wx+b\)을 생각해보자. 여기서 데이터를 가장 잘 맞추는 기울기 \(W\)는 아래와 같은 선형회귀 공식을 따른다. 각자 한번 유도해 보길 바란다.
\begin{equation}
\tag{15}
W=\frac{\mathbb{E}[yx]-\mathbb{E}[y]\mathbb{E}[x]}{\mathbb{E}[x^2]-\mathbb{E}[x]^2}
\end{equation}
이제부터 우리는 통계학에서 가장 중요한 식 가운데 하나인 선형회귀 공식을 엔트로피 함수 \(G(X)\)로부터 얻어 보겠다. 먼저 주어진 데이터 \(\{ x(t), y(t)\}\)의 빈도수로부터 원시분포 \(P_0(x,y)\)를 얻을 수 있다. 그리고 데이터의 평균 \(X= \sum_{x,y} x P(x,y)\)와 \(Y= \sum_{x,y} y P(x,y)\)을 제한조건으로 가지면서 \(P_0(x,y)\)에 가장 가까운 시스템의 모분포를 얻는다.
\begin{equation}
\tag{16}
P(x,y) = \frac{P_0(x,y) \exp(\theta \cdot x + \phi \cdot y)}{Z}
\end{equation}
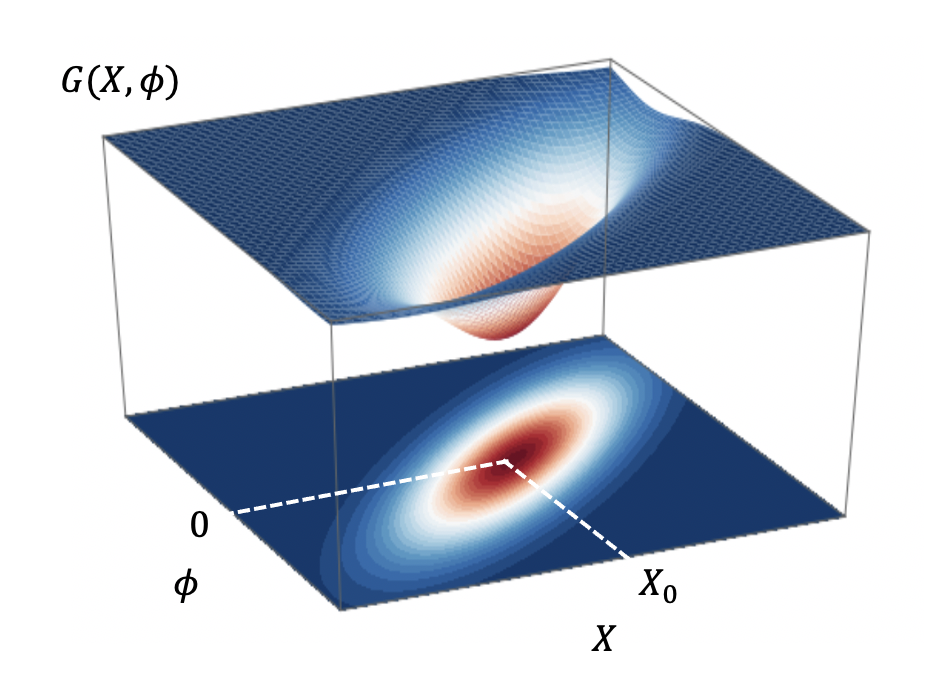
정규화 상수는 \(Z=\sum_{x,y} P_0(x,y) \exp(\theta \cdot x + \phi \cdot y)\)이다. 앞에서처럼 적률생성함수 \(F(\theta, \phi) = \log Z(\theta, \phi)\)에서 라그랑주 승수 \(\theta\)를 평균 \(X\)로 바꾸는 르장드르 변환을 통해서 엔트로피 함수 \(G(X, \phi)\)를 정의한다. 그리고 데이터가 위치하는 \(X=X_0\) 근처에서 테일러 전개를 한다.
\begin{equation}
\tag{17}
G(X,\phi) \approx G(X_0, \phi) + \frac{1}{2} C^{-1} (X-X_0)^2
\end{equation}
위 식 (17)을 \(\phi\)에 대해서 미분을 해보자.
\begin{align}
\frac{\partial G(X, \phi)}{\partial \phi} &= \frac{\partial}{\partial \phi} \bigg( \theta \cdot X – F(\theta, \phi) \bigg) \nonumber \\
&= – \frac{\partial}{\partial \phi} \log Z = -\sum_{x,y} yP(x,y) = -Y
\tag{18}
\end{align}
그리고 식 (17) 오른쪽 두 번째 항을 미분하면 다음과 같다.
\begin{align}
\frac{\partial}{\partial \phi} \bigg( \frac{1}{2} C^{-1} (X-X_0)^2 \bigg) = – C^{-1} \frac{\partial X_0}{\partial \phi} (X-X_0)
\tag{19}
\end{align}
여기서 \(\partial X_0/\partial \phi\)를 더 계산해 보자.
\begin{align}
B \equiv \bigg( \frac{\partial X_0}{\partial \phi} \bigg)_{\phi=0} &=\frac{\partial}{\partial \phi} \bigg(\sum_{x,y} \frac{xP_0(x,y) \exp(\phi y)}{Z(\theta=0, \phi)} \bigg)_{\phi=0} \nonumber \\
&= \sum_{x,y} yx P_0(x,y) – \sum_{x,y} xP_0(x,y) \sum_{x,y} y P_0(x,y) \nonumber \\
&= \mathbb{E}[yx] – \mathbb{E}[y]\mathbb{E}[x]
\tag{20}
\end{align}
이 결과들을 이용해서 식 (17)을 정리하면 다음 등식에 도착하다.
\begin{equation}
\tag{21}
Y-Y_0 = C^{-1} B(X-X_0)
\end{equation}
여기서 \(\delta X = X-X_0\) 변화에 대한 선형응답인 \(\delta Y = Y – Y_0\)를 결정하는 \(W\)는 다음과 같이 결정된다.
\begin{equation}
\tag{22}
W=C^{-1}B =\frac{\mathbb{E}[yx]-\mathbb{E}[y]\mathbb{E}[x]}{\mathbb{E}[x^2]-\mathbb{E}[x]^2}
\end{equation}
놀랍게도 이는 위 선형회귀 공식 (15)와 정확하게 일치한다.[4] 각 샘플들의 선형관계 \(y = Wx +b\)를 데이터의 평균의 관계 \(Y = WX +b\)에서 구한 셈이다.3 이렇게 얻은 \(W\)는 엔트로피 함수 \(G(X,\phi)\)에서 변수 \(X\)와 \(\phi\)의 상호작용의 세기로 해석할 수 있다.
\begin{equation}
\tag{23}
W = \frac{\partial Y}{\partial X} = -\frac{\partial}{\partial X}\bigg( \frac{\partial G}{\partial \phi} \bigg) = -\frac{\partial^2 G(X,\phi)}{\partial X \partial \phi}
\end{equation}
모시스템에서 임의의 유한한 데이터 \(\{x(t)\}\)가 주어졌을 때, 시스템을 이해한다는 것은 그런 데이터를 생성하는 모분포 \(P(x)\)를 찾는 것과 다르지 않다. 물론 신경망을 이용한 머신러닝이 이 작업을 훌륭하게 해내고 있다. 이번 글에서는 머신러닝 접근과 상호보완적인 접근이 될 수 있는 통계학적인 학습을 소개해 보았다. 모형과 데이터의 복잡도를 체계적으로 다루는 통계학적인 학습은 정보이론에 뿌리를 두고 있다. 특히 확률함수들 사이의 관계를 직접 다루는 정보기하학이 좋은 탐험 도구가 될 수 있음을 이번 글에서 살펴보았다.
물리학과 수학을 전공한 사람들이 머신러닝에 더 많이 기여하기를 기대하면서 네 번에 걸친 연재를 마친다. 그동안 관심을 가져주신 독자들에게 감사드린다.
참고문헌
- Shun-ichi Amari, "Information geometry and its applications", Springer (2016).
- https://franknielsen.github.io/FrankNielsen-distances-figs.pdf
- Solomon Kullback, "Information theory and statistics", Dover (1997).
- Danh-Tai Hoang, Juyong Song, Vipul Periwal, and Junghyo Jo, "Network inference in stochastic systems from neurons to currencies: Improved performance at small sample size", Physical Review E 99:023311 (2019).